本面板共分为四个小面板, PC VR 面板根据选择展示
状态
用于连接接收器和显示接收器连接状态
通用校准
用于动作校准以及动作校准时的关键参数配置
PC
用于通用 PC 动捕中常用参数配置和控制
VR
用于 SteamVr 下的动捕常用参数配置和控制
状态面板
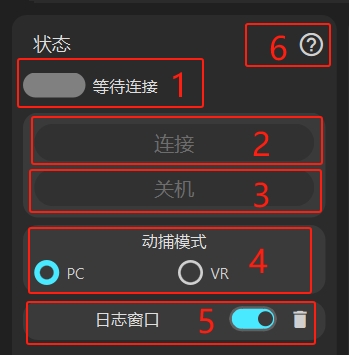
状态显示
指示连接状态,图标绿色则是已连接
连接按钮
字体为灰色则表示不可连接,说明接收器没有插入,字体白色则可连接,如果遇到连接问题,请查看这里
关机按钮
点击全部关机,如果想针对某个传感器关机,可以打开该传感器的详情进行关机(查看这里),或者直接放到充电盒子中关机(查看这里)。
动捕模式切换,根据自身使用场景切换
只有用到 SteamVR 的用户才需要切换为VR场景使用,如果是普通场景使用,比如录制动画,或者非VR场景直播,则需要切换到PC模式,注意,如果切换为VR模式,VR未连接,那么会自动切换未PC模式。
VR 无法连接请查看这里
日志开关
3D预览模式下,开关可用,默认不显示日志,右侧图标是清除日志。如果将3D预览关闭,则默认展示日志且不可关闭。
help 文档按钮
高级设置开关 开启以后,所有高级功能会展示,包括:配置的导出和加载操作、脚底替换为肩膀的功能、两次拍打传感器的功能、在
PC端输出 Steamvr 虚拟跟踪器能力、通信频道修改功能、发射信号强度、抗磁强度修改等,使用这些功能前,请务必阅读相关帮助文档!!!所有配置的导出,保存 和 回复默认值 高级功能,谨慎操作,使用的时候建议先到处备份当前设置!
通用校准面板
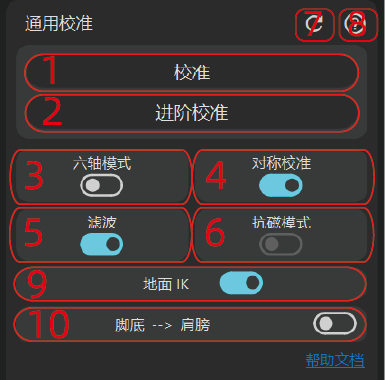
校准按钮
通用校准,需要摆出三个姿态进行校准,分别是 A-Pose、S-Pose、T-Pose,关于动作要领和校准细节请查看这里
如果校准失败,可能是以下原因:
进阶校准按钮
相比于校准按钮,这里的新增了 B-Pose,主要用于 头部、胸部、腰部 节点的航向角校准。其它和
校准功能保持一致六轴模式开关
如果用户的磁场环境很差,可以打开六轴模式,打开六轴模式之前,建议校准陀螺仪。六轴模式的含义就是,不适用磁力计传感器数据,因此不会受任何磁场环境干扰,但是带来的问题就是陀螺仪漂移,具体表现就是长时间使用会导致航向角偏移。
航向角偏移(航向角歪了)具体表现
- 站立的时候歪了,比如胸部,就是自旋转
- 前倾的时候歪了的表现是,你向着正前方弯腰,结果是向着侧前方弯腰
- 躺着的时候,比如腿你是保持和身体一条直线,那么歪了就是你的腿就是和身体有个水平夹角,比如双腿都向右歪了。
磁场环境鉴定,请查看这里
抗磁模式开关
- 对于磁场环境存在个别点位较差的情况,可以开启抗磁模式
- 如果希望传感器在身体小幅度晃动时跟随更快,可以开启抗磁模式
比如左右晃动的情况下,抗磁模式相比于非抗磁模式会跟随更快,非抗磁模式在小幅度晃动下,跟随较慢,但是大幅度下影响不大。
[info]什么时候关闭抗磁模式
- 对于大幅度跳舞用户,建议关闭抗磁模式,并且也不建议使用6轴模式,跳舞用户建议在磁场良好的环境中进行。
当然未来我们也可能会出专业版传感器,陀螺仪性能更优,可能具备大幅度跳舞模式,不使用磁力计,敬请期待
- 如果整体磁场都很混乱,比如附近有变压器,或者房间有大喇叭,并且磁场辐射范围广,或者在铁质弹簧床上使用,那么建议开启6轴模式。
抗磁开关由跟踪器记忆,也就是每次打开和关闭会将结果存放在跟踪器中,而不是存放于软件配置中。
滤波开关
用于平滑动作抖动,一般情况下建议开启,如果发现某个部位抖动还是比较大,检查如下:
- 先检查穿戴是否导致抖动,比如跟踪器悬空
- 检查抗磁等级,一般建议设置为 12,如果发生抖动,请调节会 12 再测试,调节请查看这里
对称校准开关
这里的开关只在校准时刻生效,主要用于消除磁场航向角测量误差(磁场航向角测量是根据校准动作来测量,校准动作存在误差,而且磁场本身存在抖动,因此测量也会存在误差),一般建议开启【6轴模式会自动关闭】。具体作用是,校准的时候,在同一水平位置下,会对左右两个跟踪器的航向角取均值,比如左上腿当前站立方向测量航向角为10度,右上腿测量是20度,那么会采用15度均值。
只有左右双腿在同一水平高度下,磁场航向方向差异较大,才需要关闭,一般如果同一高度下磁场差异较大,说明磁场环境较差,建议使用6轴。
关于磁场环境鉴定,请查看这里
reset 按钮
会重置当前面板的参数为默认参数!后续面板功能相同,不再重复描述!
help 文档按钮
地面 IK
用于调节双脚不平衡问题,比如坐下后,双脚一只脚在地面,另一只脚离地面 2cm 高,同时可以缓解双脚切换过程中上下震荡问题
脚底替换为肩膀
高级功能,开启后,脚底会自动替换为肩膀,左脚对应左肩,右脚对应右肩。开启后,需要打开
AI Engine.配置哪些六轴点位开启六轴功能
默认六轴模式下,全部开启六轴功能,取消选择则改点使用非六轴模式。
PC 面板
这里的设置不影响 VR 使用用户,VR用户可以跳过这里。

帧缓存
默认情况下,PC 使用会有两帧缓存,约34ms,缓存能增加稳定性,例如漂移可能会更小,对于半身使用用户,可以关闭,跟随会更实时。帧缓存在
AI Engine开启后默认不启用。镜像模式
左右镜像,主播用户可能需要用到,类似照镜子,左右互反。
AI 引擎
打开后,人物整体的位移和脚底接触由
AI模型判定,而不是使用传统的算法和策略判定。PC版本的AI引擎支持两种模型,一种是双脚穿戴传感器的(with foot)、另一种双脚可以不穿戴传感器(no foot) 如果双脚没有佩戴传感器选择with foot模型,由于该模型需要使用到双脚传感器数据,因此会自动切换到no foot,但是no foot模式可以支持双脚佩戴传感器。位置和朝向以及姿态
惯性动捕原点容易发生漂移,可以直接重置原点(也就是最初的位置),可以自己设置重置间隔,默认 0 分钟,不会自动重置,如果设置为
n分钟,则每n分钟重置一次人物位移也可以锁定人物 水平面上的位移,以及 垂直平面的位移,这两个功能直播用户一般有需求
可以手动调节人物基准位置以及人物的朝向,默认为原点,动画或者直播用户可以使用,比如部分主播房间很小,没办法朝向显示屏摆出
T-Pose,则可以完成动作校准以后修改人物朝向。位置分别是
x y z的顺序,右手坐标系,表示全局位移,x正方形指向屏幕右侧,y正方向指向空间上方,z正方向由屏幕内测指向外侧,最大值 99.9 米,角度代表人物朝向。姿态冻结针对主播用户开发,用于固定姿态,处理其它不方便事务,防止暴露姿态。打开开关,姿态会定格在打开开关的瞬间,关闭开关后恢复到当前实时动捕状态。
对外协议输出
VMC输出
VMC 协议用户会用到,如果第三方软件是通过 VMC 协议接入的,需要打开 VMC 输出。
- 关闭以后可以调节端口号,然后再开启
- VMC 缩放主要用于适配人物骨架,如果 rebocap 中驱动的人物骨架和目标骨架不一致,会导致滑步或者脚底悬空,或者脚在地板下等现象,可以调节这里缓解。但是如果你使用的是VRM 模型,强烈建议上传 VRM 模型,这里设置为 1.0,或者如果您使用其它模型,希望有更好的表现,也建议您这边上传骨架,骨架可以通过 Blender 插件导出,具体导出请查看 Blender插件使用
VR输出(高级功能)
开启后,如果连接上了 SteamVR,会自动输出虚拟跟踪器到 SteamVR 中,如果需要修改跟踪器输出节点,请临时切换到
VR面板,修改 VR 输出配置,然后切换回来,这里输出的是当前虚拟骨骼上跟踪点的位置,不受头显干扰。 这里是社区给出的无头显在steamvr使用说明,官方不承担任何后果,仅供参考,仅有中文,其它语言版本请自行使用浏览器翻译功能:https://forum.rebocap.site/t/vmt-rebocap/240录制和离线加载功能
录制功能
基本使用步骤是:开始录制->结束录制->动作导出,这里可以导出3种类型,fbx、bvh、dae格式。未来考虑支持
MMD动画。 其中,fbx6 是传统fbx格式,最新的软件有很多不支持传统fbx格式。导出的 FBX 骨架和
Mixamo兼容,可以直接导入到Blender以及其它 3D 软件中。根动画和增加T-Pose为可选项,默认动捕移动的是屁股节点,如果是根动画,移动的是根节点。另外,如果希望动画开始部分是T-Pose默认姿态,可以打开此选项。如果你需要使用 FBX 制作动画,请注意,一定要使用旋转信息而不是导出的FBX的骨骼绝对方向,后续我们会邀请社区成员录制动捕数据制作动画的视频。
离线加载
用途:离线记载和播放用于加载导出的
.rebo_anim原始记录的数据 用法:点击离线加载,选择原始记录数据文件,即可开始自动播放动画,并且和在线一致,可以在加载以前,修改用户骨架,选择是否使用IK,是否使用AI Engine等,并且动捕参数修改实时生效。 播放速度可调节,但是会改变 SDK 输出帧率,目前没有采样和插值策略。可以暂停播放,开始播放,循环播放等,播放完毕后,播放状态控制按钮不会修改文字状态,需要再次播放,两次点击播放控制按钮即可。 录制动画为 60 帧率,因此可以根据时长计算目标帧率,比如希望跳转到 10.5 秒,则可以跳转到 630 帧,修改帧号后会立即跳转。[info]使用官方默认数据说明 如果用户希望了解是否能够支持自身的软件,或者希望了解效果,都可以使用离线。目前阶段离线数据是一支舞蹈视频,建议提前上传骨架,修改为
AI Engine,使用with foot模式,并打开Ground IK。 由于录制数据时,动捕人员穿戴在肚子上,非胯部,因此建议将动捕参数种,IK参数种,腰部灵活性修改为 1.3,IK权重建议设置为 1.4,腿部弯曲修改为 3.5 附近。双击校准-胸部
开启后,双击传感器可以实现触发功能,胸部双击用于重置原点。
注意:双击指的是拍打传感器,而不是双击传感器的按钮!不要误触按钮!拍打间隔最长 0.45 秒,最短 0.2秒,需要一定力度拍打。
双击校准-腰部
开启后,双击传感器可以实现触发功能,胸部双击用于重置原点,腰部双击用于触发 动作校准 功能
VR 面板
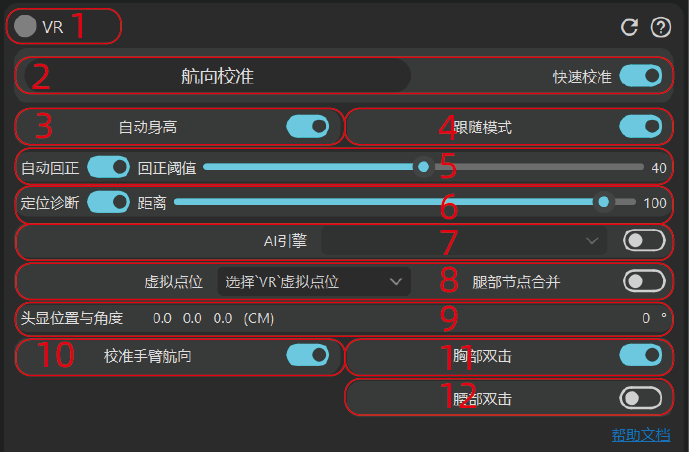
SteamVR 连接状态指示
如果连接成功,则为绿色,否则没有连接,无法连接请查看这里
航向回正
航向回正时,全身务必保持侧边没有角度,只有围绕人体侧边轴向旋转。比如站立时保持 apose,做下时,膝盖指向位于正前方,躺下时人的身体在一条直线上。这里航向校准暂时不会对手臂部位生效,后续会考虑加入手臂。
这里的功能主要用于航向歪了后校准,航向歪了的表现见这里,如果校准后仍发现歪斜,请考虑以下三个因素:
- 绑带本身歪了
- 安全区域导致没有关闭,关闭一体机安全区域
- 使用类似 vrc toolkit 修改了航向角,需要重置为0
这里的快速跳过开关,主要用于缩短航向校准时间,未开启的情况下,会给出时间预留提示,开启以后将不会预留提示时间。
头显位置信息
这里会显示头显位置,单位是 CM,第二个数据是高度,最右侧是头显自身的俯仰角。
防止脚滑
关闭防止脚滑,身体点位驱动完全按照头显的位置来,不会有脚底固定在地面。因此默认模式下,一定会有脚滑现象,身体骨骼和现实保持一致能够缓解。
另外,当人物的脚底高度大于20cm左右,内部计算也会自动切换到默认模式。防止脚滑开启以后,脚底会强制粘住地板,非快速动作下,表现更自然,一般推荐非激烈舞蹈使用。
地面碰撞 IK
用于调节双脚不平衡问题,比如坐下后,双脚一只脚在地面,另一只脚离地面 2cm 高,同时可以缓解双脚切换过程中上下震荡问题
自动回正功能
这里的自动回正,是用户在全身静止1秒左右会触发自动回正,回正阈值指的是当前姿态和跟随模式(也就是完全根据头显定位)姿态下,虚拟跟踪器的距离,当存在跟踪器的距离大于回正阈值,会触发回正现象,因此如果阈值很低,会频繁发生回正,看到的现象就是跟踪器时长会发生小幅度瞬移。
回正后,跟踪器会立即回正到跟随模式下的位置。因此如果发现回正结果不会,可以切换到跟随模式查看,可能是本身航向角歪了或者是本身绑带歪了。
胸|腰 跟随头显
默认情况下,如果防止脚滑开关打开,那么所有节点位置采用头显和脚底的位置共同决策出来,这里的开关开启以后,胸部和腰部的节点位置只由头显的位置决定。
虚拟点位
这里控制显示那些虚拟跟踪器,可以自行配置。比如默认手臂会开启,可以点击这里,取消手臂点位。如果打开 VRC模式,那么会将上腿和下腿的传感器合并,并放置到膝盖位置,玩家可以根据实际情况选择是否开启,开启 VRC 模式不一定会在 VRC 下表现更好,这里的选项,主要是将虚拟跟踪器放到更符合 VRC IK 计算点位,但是并不代表效果会更好,VRC IK受很多因素影响,比如虚拟骨骼是否和真人一致等。
关机自动隐藏
把没有用到的传感器自动隐藏起来,但是这里有一个特殊情况,如果使用腿部节点合并功能,则脚底传感器会豁免隐藏功能。
腿部节点合并
合并上腿和下腿的虚拟传感器到膝盖关节,这里也是 VRC 默认推荐的传感器关节点位,但是并不意味着在 VRC 内部表现效果更好!
定位诊断
功能是辅助判断跟踪器定位效果,打开以后,会复制一组新的虚拟跟踪器,位置在自身正前方,距离单位是cm,距离可以通过滑动条调节。如果要看到虚拟跟踪器,建议切换到 steamVR 默认场景中查看!第三方软件如 reborn 或者 VRC,非特殊模式一般虚拟跟踪器不可见。
虚拟地面高度
主要用于解决:去高出地面的台阶(例如穿上)使用,或者下到比地面地的台阶使用,虚拟地面还是按照原始地面计算,导致效果不好。其它情况也可以根据实际设置,比如部分玩家,可能将虚拟地面高度设置到地面以上(3~5cm)附近,IK解算空间更大,整体效果会更好一点。
AI 引擎
打开AI引擎,可以支持5点动捕,脚腕佩戴两点(建议在脚踝上方5cm左右),大腿佩戴两点,腰部佩戴一点,这是最少点位佩戴要求。其它点位可以自行根据实际情况佩戴,如果不佩戴,则会使用AI模型预测脚底和胸部节点的方向。
「原地行走 & 替换位置」功能开关
这两个功能都是 rebocap 插件采用拦截steamvr内部手柄控制器的方式实现,对于官方串流工具例如
steam link、pico connect等没有影响,但是对于 VD 串流(VirtualDesktop),会导致 VD 串流无法从手柄状态切换到手指追踪状态。此功能每次开启或者关闭,需要重启 SteamVR 才会生效。如果此功能关闭,那么无法使用 原地行走 以及 替换控制器 位置功能。
原地行走功能编辑区
此功能必须要求开启功能开关,也就是上方的 「原地行走 & 替换位置」功能开关。此功能的作用是原地行走的时候,会劫持控制器的摇杆数据(可以自行选择左手摇杆还是右手摇杆),通过原地踏步的形式,模拟产生摇杆数据,从而达到通过原地踏步让游戏中的人物行走的目的,此功能可以比较好的缓解摇杆控制行走时头晕现象(具有一定的大脑皮层欺骗性)。原地踏步期间,默认朝向正前方行走,对应的摇杆可以控制行走方向,比如可以后退,原地踏步的速度可以通过调节行走倍率来调控,同时自身踏步的角速度也会直接影响前进速度。
默认情况下,原地踏步功能开启以后,对应的手柄控制器的摇杆功能会失效,但是我们增加了一个开关,在没有检测到原地踏步时,恢复摇杆功能,但是可能会容易导致头晕。
校准手臂航向角
开启后,如果手臂的节点打开,点击航向校准的时候,会同时矫正手臂的航向角度,建议航向校准期间,手臂对称放置,自然贴着腋下即可(和胸部大约保持 10~25度角度),可自行感受校准效果来摆放手臂位置。
替换控制器位置
此功能必须要求开启功能开关,也就是上方的 「原地行走 & 替换位置」功能开关,开启以后,如果同时打开两只手的输出节点,那么会使用 rebocap 跟踪器的点位覆盖到手柄控制器的输出点位上,此过程要求手柄控制器保持连接状态。此功能核心作用是:可以解决手柄控制器在HMD头显视觉盲区时的定位丢失现象。
注意,部分手柄控制器的射线角度和手柄方向不一致,这个时候需要修改
data/replace_controller_angle.txt文件,修改控制器补偿角度,例如pico的手柄控制器需要修改为25(对应的作用就是向前旋转25度),可以根据 Tpose 的时候手柄的朝向修改,每次修改以后,开关当前功能按钮后生效。胸部双击(高级功能)
开启后,双击胸部传感器,用于触发 航向校准 功能。
注意:双击指的是拍打传感器,而不是双击传感器的按钮!不要误触按钮!拍打间隔最长 0.45 秒,最短 0.2秒,需要一定力度拍打。另外,睡觉期间,存在误触发可能性,建议关闭。
腰部双击(高级功能)
用法同 胸部双击,双击后,触发 动作校准 功能。
VR 自动身高
已经迁移到骨架部分,默认开启,这里的自动身高是根据头显的高度推算出个人身高。但是头显的身高测量容易受个人环境影响,而且也和头显测量精度有关,目前测量身高计算方式:height = headset * 1.05。
也就是说,校准的时候低头、抬头都会影响身高测量,一般情况下,尽量保证身高测量误差在 ±3cm以内比较好,如果误差较大,考虑校准头显距离地面高度。
[danger]测量误差说明
高度测量误差较大,和 rebocap 设备没有任何关系,和rebocap软件本身也没有任何关系,rebocap 只是读取头显的高度,然后乘 1.05 的系数推算出身高,如果误差较大,一般是一体机高度测量误差导致!!!
一体机测量误差,一般校准地面高度能够解决,如果还是有很大的误差,考虑是周边环境影响(一体机测量一般主要以摄像头看到的环境来进行测量),找到房间相对空旷的场地可能有所缓解。