閱讀本教程之前,請務必仔細閱讀 SteamVR 的接入!!!如果steamVR上 rebocap 的跟踪器圖標都沒有點亮過,本教程沒有任何意義!!!
VRChat 基本設定
vrchat 基礎設定介紹
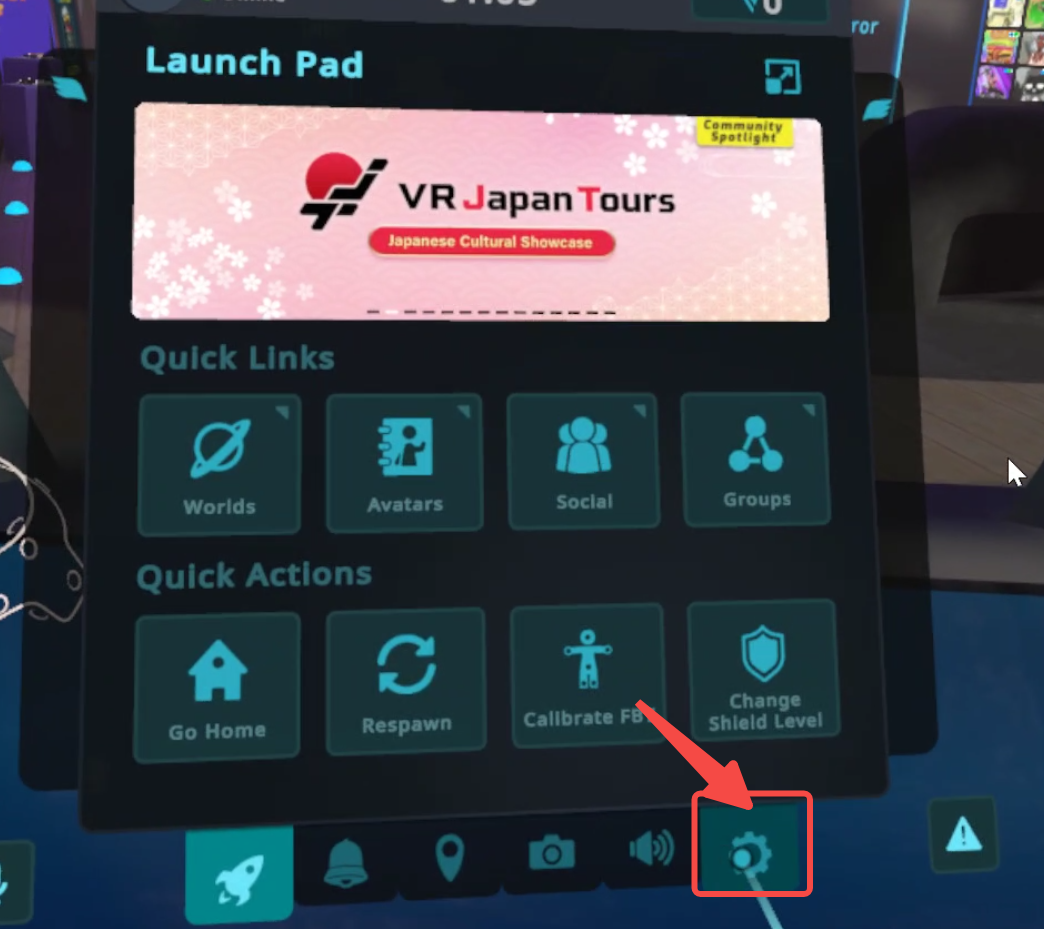
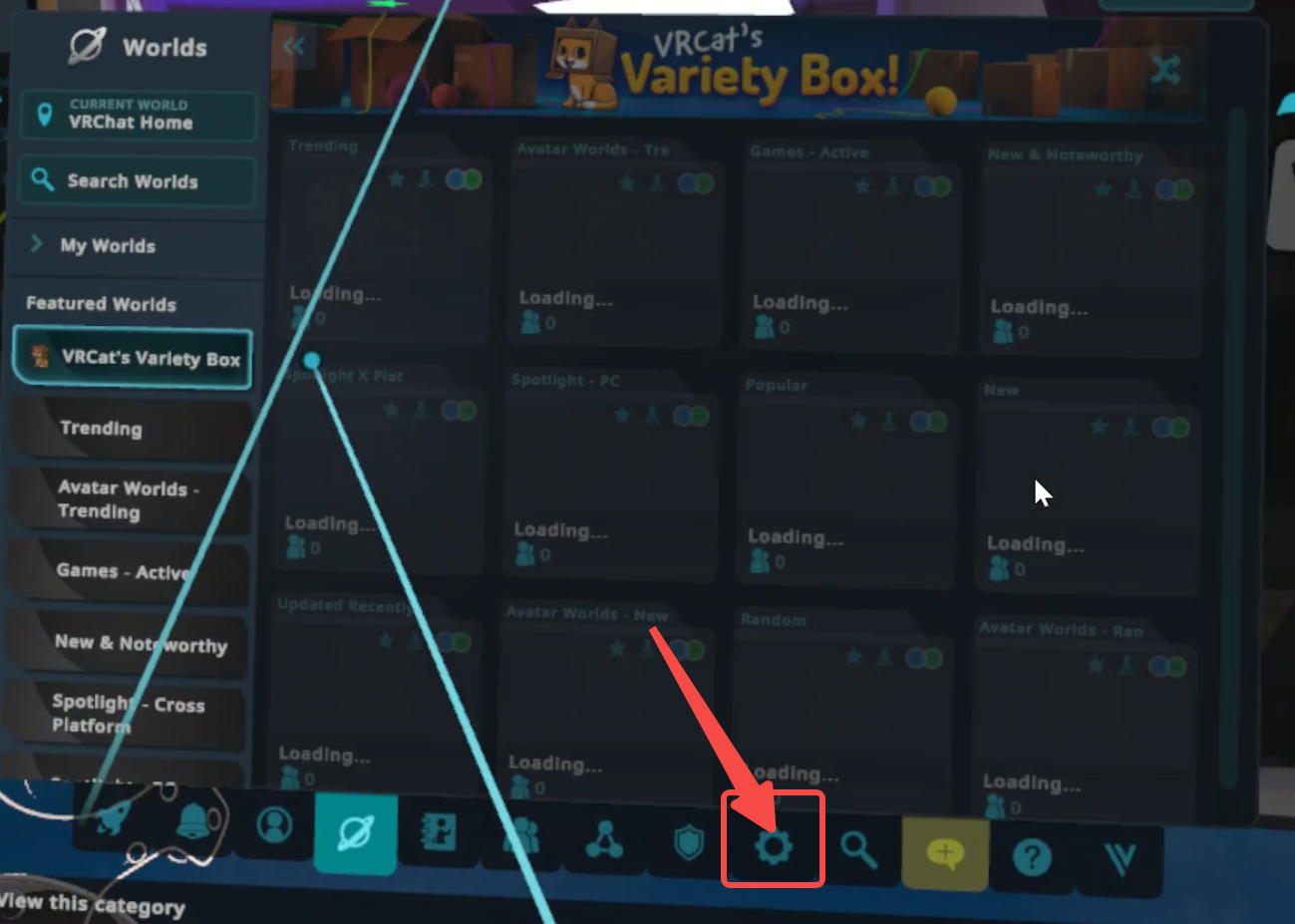
打開基礎設定請按照下述步驟: 按手柄的 Y 按鈕召喚菜單->點擊齒輪圖標->往下滑動到 Tracking & IK,如圖所示
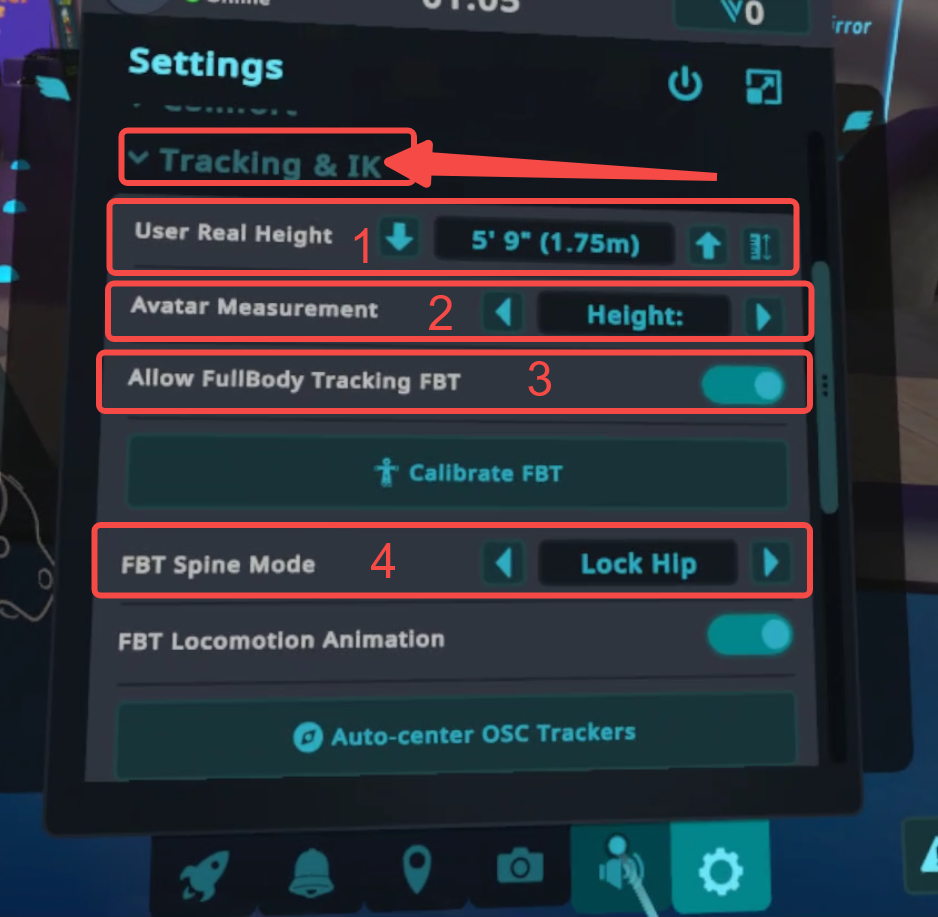
基礎 IK 設定介紹關鍵點介紹:
調節 VRChat 中的身高
使用者真實身高,這裡填寫和 Rebocap 中測量一致的身高即可,而不應該填寫你的真實身高!因為所有的跟踪器都是按照 Rebocap 測量的高度來模擬的
Rebocap 測量身高是頭顯身高 * 1.05,關於身高測量錯誤請查看這裡。
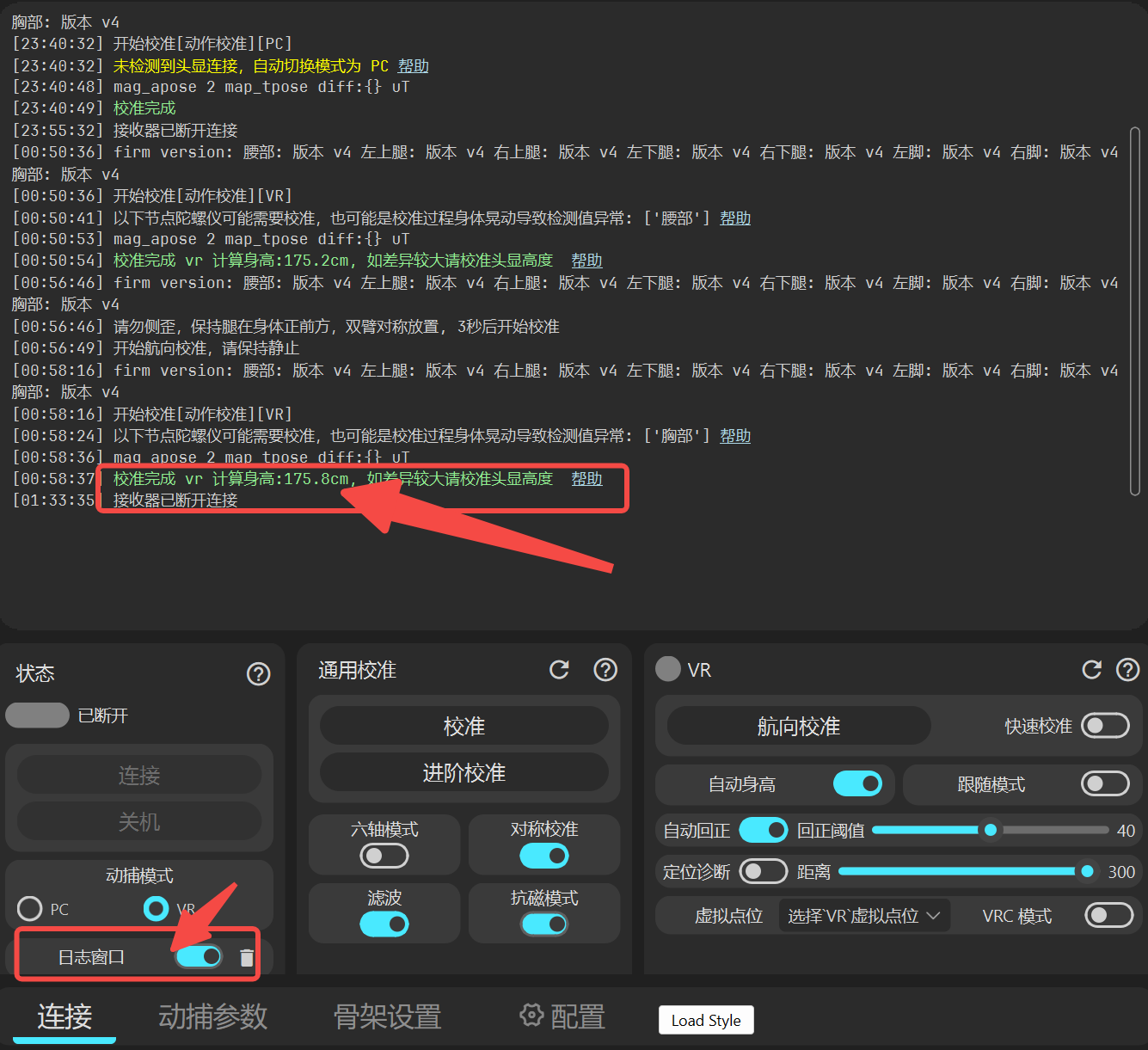
如果你的頭顯測量的高度始終和自身不一致(指的是超過自身身高±5cm),那麼可以關閉VR面板中的自動身高測量,在骨架頁面調節身高即可。以最終顯示的高度為準!然後在VRChat中,將身高設置為 Rebocap 中最終顯示的身高。 注意,這個解決方案並不是最好的,因為如果頭顯本身測量身高不對,那麼頭顯在空間中的位移量也是不正確的,比如頭顯真實向下移動一米,可能頭顯給出的移動數據只有0.6米,導致最終跟踪效果變差!
查看 Rebocap 測量身高方法:打開日誌即可看到歷史消息(如果你關閉自動身高,這裡將不會顯示!)
調節 VRChat 測量模式
剛使用VRChat全身動捕的使用者,統一使用
Height模式!對 VRChat IK 熟悉的使用者,可以考慮使用 Arm 模式,配合 Arm是否允許全身追蹤
必須允許,如圖中狀態是開啟
IK 鎖定模式
這個可以自行調節查看不同效果,如果不清楚,可以使用 LockHip 或者 LockHead,效果會有比較大的出入,特別是在坐下或者躺下的姿態會存在出入
vrchat 高級 IK 設定介紹
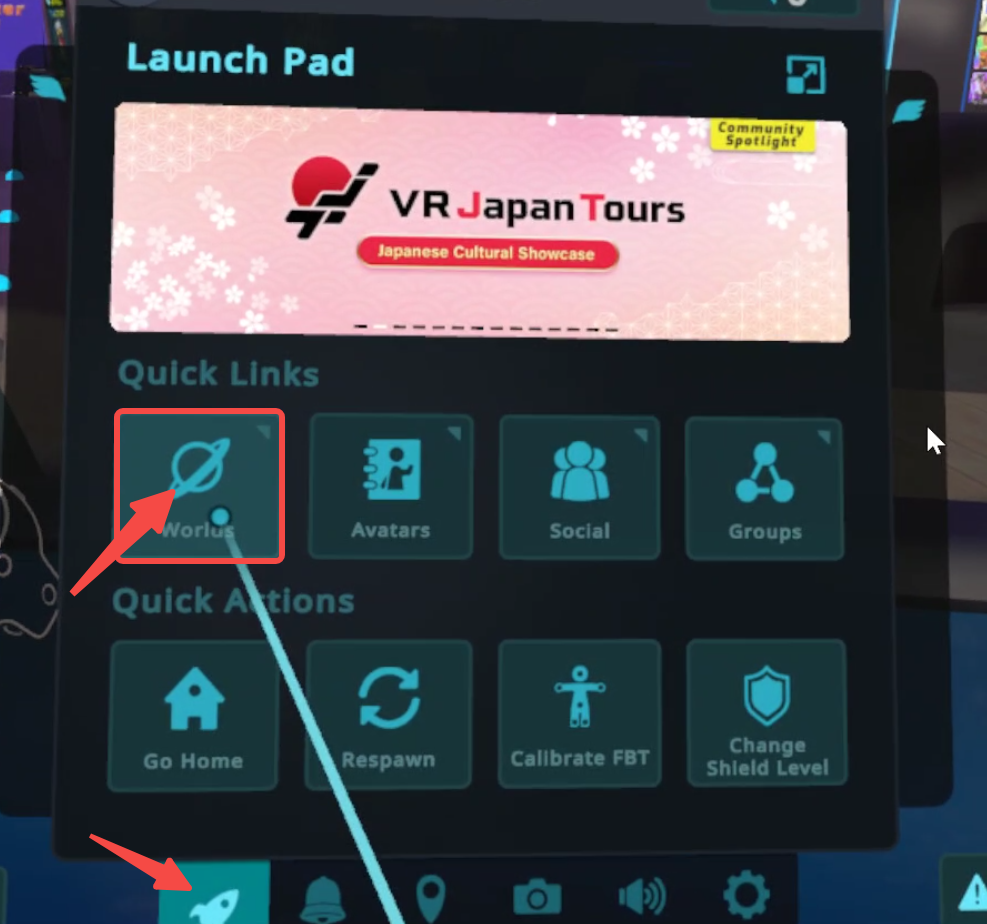
打開基礎設定請按照以下步驟: 按手柄的 Y 按鈕召喚菜單->點擊world,出現大的設定面板->點擊齒輪圖標->選擇左側 Tracking & IK,如圖所示
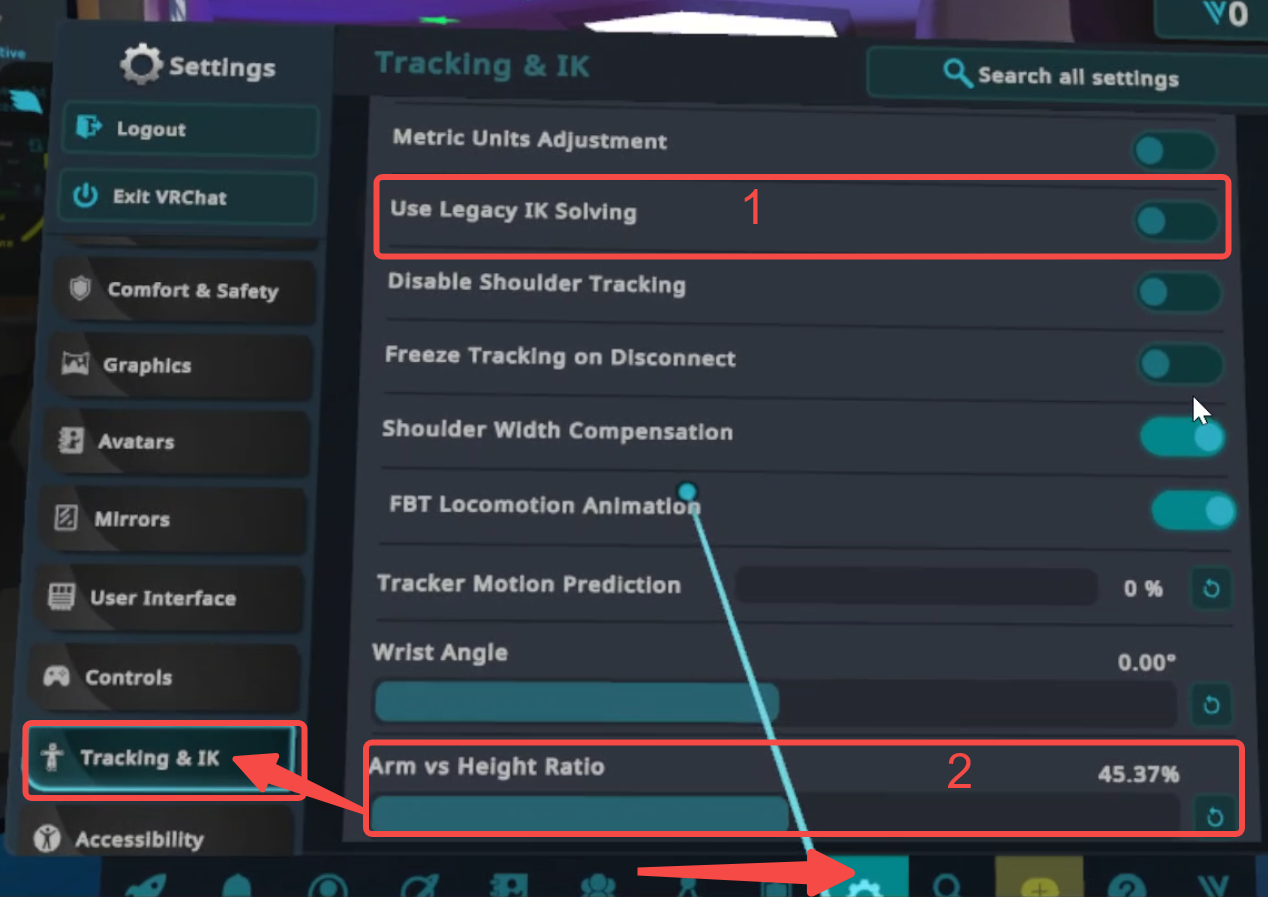
特別說明:剛使用VRChat全身動捕的使用者,除了圖中標註的,其它全部使用默認設定!!!可以參考截圖
圖中標註的4個設定介紹:
- 是否使用傳統 IK 開關!
不建議開啟,默認使用 IK 2.0,使用傳統 IK 會帶來其它問題,比如腰部下陷到屁股中
- 手臂身高比例
只有設定 測量模式 為 Arm,這裡的選項才會有效!用於熟悉 VRChat IK 使用者使用,不熟悉不建議使用,如果使用有問題,可以和其它使用者交流,官方不在這個點上做任何技術支持!
一般情況下,設定為Arm模式,可以調節這裡的比例,讓腿部表現更自然,具體方法是,打開 VRChat 中的校準模式,看到跟踪器點位以後,通過比例,讓腳上跟踪器的點位在腳背附近即可。
> **[danger]提示**
>
> 如果使用者發現點位少了,很可能是陷入到地板下邊了!可以抬腳看下!
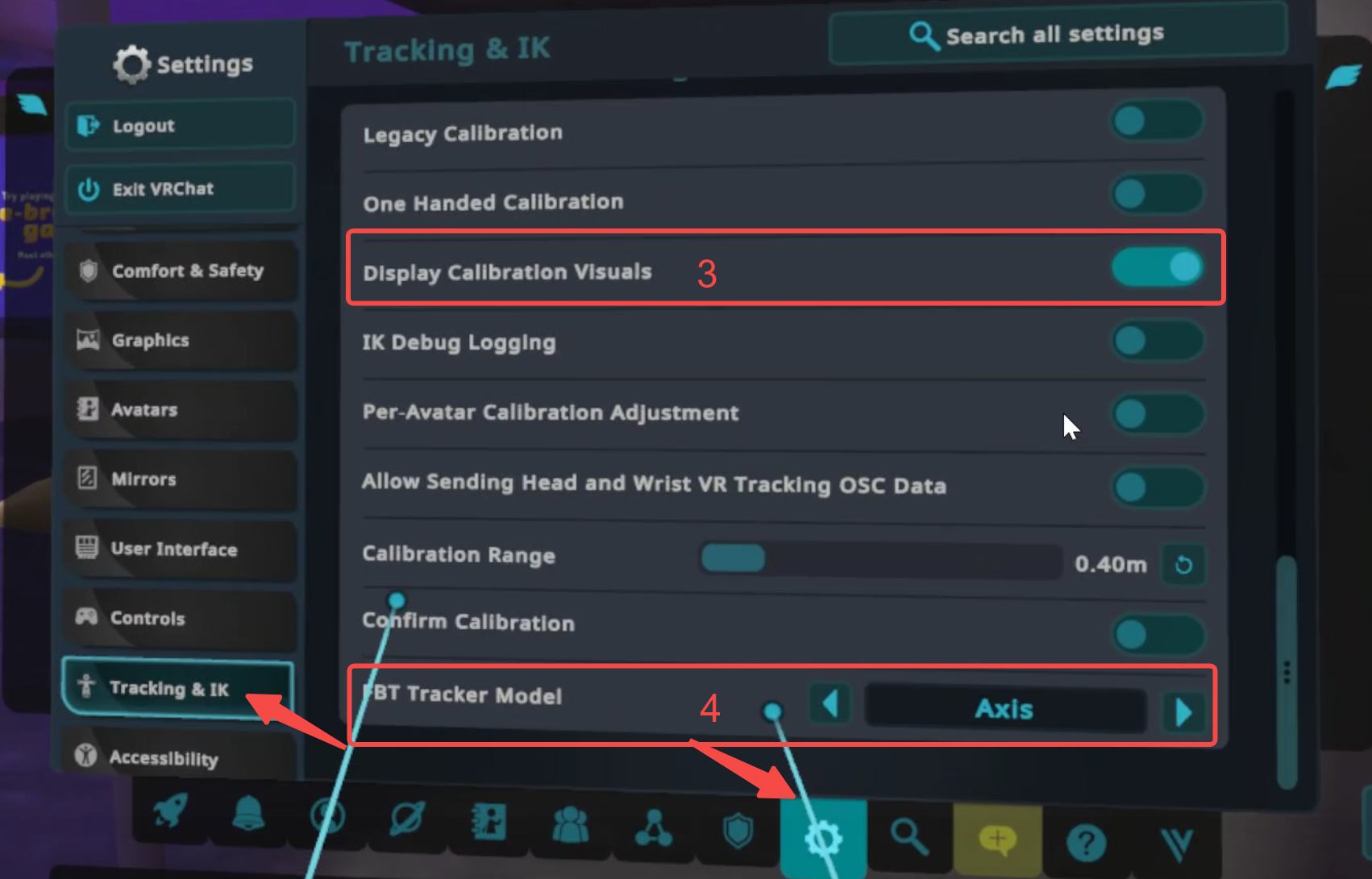
是否顯示追蹤器校準範圍
也就是那個綠色的範圍球
切換追蹤器顯示模型
如果需要切換為十字架,按照圖中設置的
axis即可,可以自行切換查看
如何在VRChat中進行校準
前述基礎設置完成後,按照如下流程:
- 按左手柄Y按鈕打開設置面板
- 點擊面板中的小人圖標(前提是 steamVR 中虛擬追蹤器已經被激活了,否則這裡的圖標和下圖不一致,不清楚請查看 SteamVR接入)
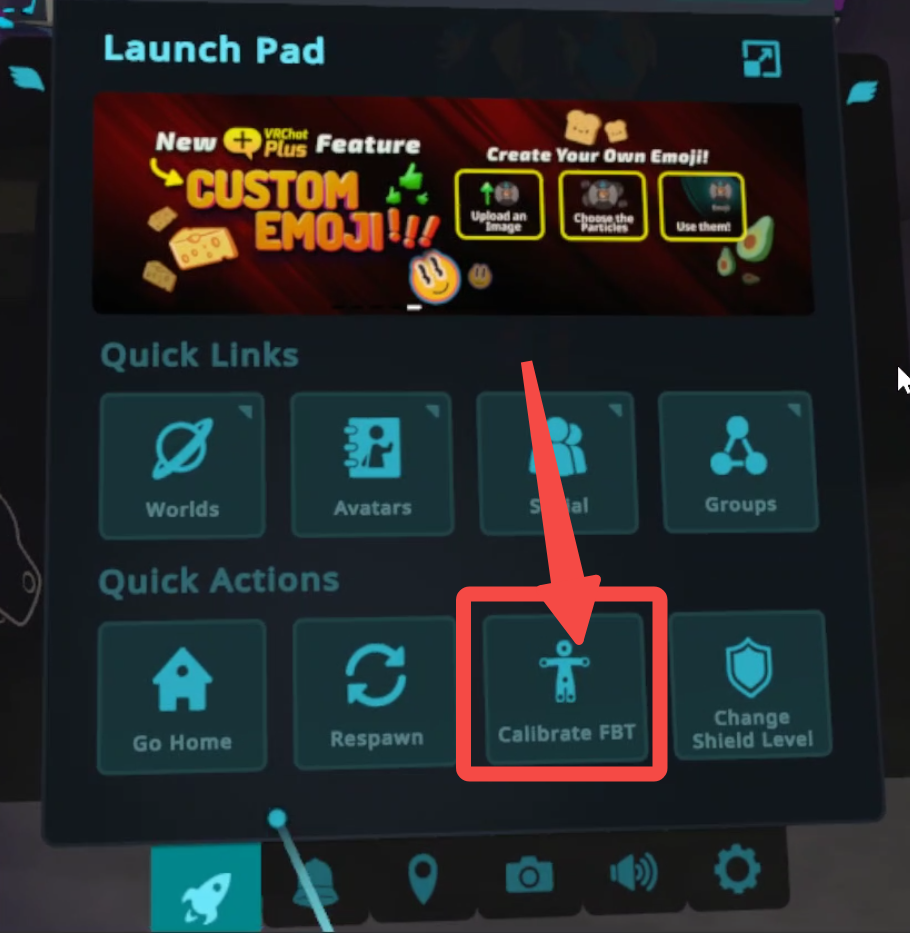
Figure: 全身校準按鈕 - 調節站姿,擺出Tpose,讓腳背的追蹤器點位在腳背附近,如果打開了綠色的範圍球,讓範圍球儘量小點(對IK非常熟悉的使用者,可以自行調節)
如果發現腳背在地板下邊,這個往往是 VRChat 的Bug導致,VRChat對地面識別存在問題,比如你將手柄放置在現實中的地板,VRChat中手柄的位置可能在地板下邊(如果懸空也是同理)。
目前沒有很好的辦法解決,可以重啟VRChat,也可以校準以後,使用
ovr advanced setting調節地面高度,一定要在動作校準以後再調節!!! 保持T-pose,如果全身對齊了,兩隻手同時扣下扳機按鍵(扳機按鍵指的是食指常駐區域按鍵),即可完成 VRChat 中的校準!
VRChat 遇到問題診斷步驟
非細節問題,細節問題一般特指:腿在某個狀態下無法伸直等,這些和VRC以及骨架設置相關性比較高。後續會補充說明。
這裡主要解決歪了,或者整體錯亂問題。
細節問題以後會給出一些文檔說明,目前可以諮詢資深群友
- 查看3D預覽界面是否正常
- 查看SteamVR預設界面中的追蹤器是否正常
具體請查看這裡
- 檢查 VRC 關鍵設置是否和上述教程一致
為什麼VRC中人物手臂無法伸直
- 和模型骨架與自身骨架不匹配導致,如果模型骨架的手臂偏短,就比較容易伸直,核心是骨骼比例和現實人物不一致導致。
高級玩家可以自行嘗試使用 Arm 模式,然後修改
arm vs height ratio。這裡舉個極端例子方便玩家理解,比如虛擬人物的手臂有3米,人物本身的高度只有1.7米,現實中人物雙臂正常下垂的位置在腰這裡,但是 VRChat 必須要尊重現實中手部的位置,那麼只能將虛擬人物的手臂彎曲一定的角度了。
為什麼我校準的時候,人物的雙腳在地板下邊
這裡在 如何在VRChat中進行校準 的第三點已經有說明
為什麼我的雙腿無法伸直
這裡和虛擬人物骨骼比例和現實中出入比較大有關,一般使用和自身一致的人物骨架,然後在rebocap中也調節為這個骨架效果最好。
另外,也可以使用一點校準的小技巧緩解這個問題,比如將 VRChat 中的身高設置比rebocap中測量的低一點點,腿在坐姿模式下更容易伸直。
這裡針對的是非跳舞使用者,跳舞使用者,依然建議按照 rebocap 測量身高設置。
為什麼坐下以後雙腳會交叉
- 排除褲襠拉扯影響
- 更改大腿追蹤器位置,查看不同位置的效果
- 如果仍有問題,請調節補償(優先調節大腿補償),根據3D預覽中效果調節即可!
- 動作校準期間,雙腳間距離更近一些
- 在 VRChat 校準期間,雙腳間距離更近一點
關於1、2兩個點,具體描述請仔細閱讀教程部分
怎麼提升穩定性