上腿補償

應用補償
開啟後應用補償功能,這裡的補償主要用於補償因為肉體形變或者綁帶拉扯帶來的形變。
校準時自動計算
根據S-Pose時的形變量來計算,如果需要更好的效果,建議坐下以後調節,使用手動調節,由於穿戴位置變化或者綁帶因為摩擦力而導致受力不均,可能每次自動校準的結果也會有所不同。
側偏補償
- 這裡的補償,主要是用於補償坐下或者躺下因為肉體形變而帶來的側歪現象,不用補償磁場帶來的問題,一般肉體形變帶來的問題往往比較對稱,這裡的補償同時作用於左上腿和右上腿。
- 如果需要手動調節,可以坐下後打開3d預覽窗口調節,不建議VR下看著自身的跟蹤器調節。
- 部分情況的偏移可能是磁場導致,請查看這裡
[info]注意!!!
建議用戶先找到最佳綁定位置後再調節補償,補償值越小越好。 測試綁定位置的時候建議不要穿長褲,建議綁帶直接貼著皮膚表面測試(個別人員如果對綁帶毛面過敏,可以墊一張紙巾)。從目前結果反饋,部分人放在雙腿的外側面效果好,部分人放在膝蓋正上方位置效果好,請以最終測試結果為準!
關閉補償,然後充分測試最佳綁定位置以後,再開啟啟動補償機制更好。
高低補償
- 主要用於補償坐下後高低腿問題,比如坐下後左腿比右腿高,需要更好效果建議坐下後手動調節,調節到雙腳高度相同即可。
- 造成高低腿有兩個原因
- apose校準時,兩隻腿的角度不一致(左右腿長度差異容易導致這種現象),比如左腿膝蓋用力往後,而右腿膝蓋微微向前,這時就容易高低腿
- 兩隻腿肌肉分佈差異較大,也容易造成高低腿現象
旋轉補償
- 旋轉補償的補償機制和高低補償類似,只是高低補償是用於將雙腿補償到相同數值,旋轉補償則是針對雙腿應用相同的角度。
- 坐下後補償,補償值越大,人物屁股位置會越高
為什麼需要這個補償:主要是人體肉體組織呈現一定流動性,容易受重力影響,特別是佩戴在正面,傳感器和骨骼的相對校對會發生變化。比如你坐下以後,上腿是和地面平行的,屁股和膝蓋高度一致,但是你如果仔細觀察虛擬人物,會發現虛擬人物的屁股可能低於虛擬人物膝蓋,這個時候就可以調節補償值保持和現實接近一致了。
線性區間
補償的計算邏輯,比如補償值是10,線性區間設置為25度,那麼當大腿相對於Apose時微微彎曲,那麼彎曲的角度是12.5度的時候,給出的補償值就是5,如果彎曲的角度是25度,給出的補償值就是10,彎曲90度,給出的補償值還是10。大部分情況線性區間是25~45度。可以根據自行情況調節。
上腿默認夾角
這裡主要是修改校準時刻真人上腿相對於地面的夾角,默認只垂直向下,夾角為0。這裡的功能是方便有一定的 X 型腿或者 O 型腿,或者校準的時候習慣於雙腿間距較遠用戶。
數值越大,虛擬人物雙腿越分散,注意,這裡和側偏補償不同,這裡的調節,站立情況下也會生效。對於小腿,按照經驗,調節為大腿的一半即可。
下腿補償
功能和上腿補償一致,具體用法參考上腿補償,但是需要注意,坐下的時候下腿相對於Apose 姿態下,偏轉角度很小,所以一般無需在坐下的時候補償,下腿彎曲向後以及躺下可以查看補償效果。

IK、肩部及其它補償
IK 參數
當前的IK主要用於重新計算腿部,增加腿部穩定性,從而增加整體穩定性。
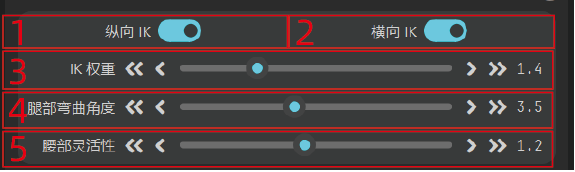
縱向 IK 開關
開啟以後,會盡可能降低人物上下起伏抖動,但是目前無法完全避免,未來離線優化可能能應對這種情況。
橫向 IK 開關
開啟以後,如果人物雙腳不動,雙腿和腰部有角度活動,虛擬人物雙腳會盡可能保持同時靜止。否則,會因為骨架不同等,導致只有一隻腳靜止,另一隻腳小範圍活動。
IK 權重
IK 權重越高,IK 干預力度越大,越小則越趨向於原始的角度,並且IK調節角度增量的速度也會更慢,可以和關閉 IK 對比效果出入。
腿部彎曲角度
增加腿部彎曲程度,IK解算範圍更大,整體更穩定,但是代價是腿部默認會彎曲,一般調節到 3~4 附近即可。
腰部靈活性
數值越大,腰部運動會越靈活,但是可能和現實運動有出入,酌情調節。
手臂約束參數
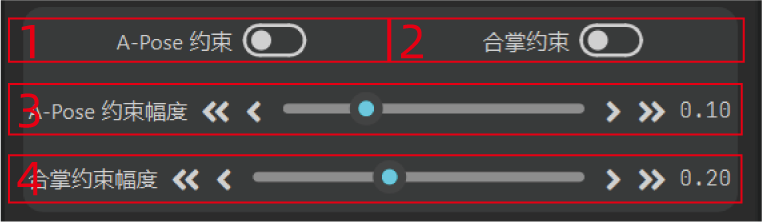
A-Pose 約束
主要用於約束 A-Pose 手臂不要貼近身體,這裡主要是考慮到主播使用者的需求,許多主播模型肩膀太窄,如果手臂與現實人物保持一致,就會明顯穿模。可以依照圖中
3標示,調整手臂約束範圍,數值越大,手臂越遠離身體。合掌約束
主要用於調節鼓掌的時候交叉手,因為很多 虛擬人物 手臂很長,現實人物鼓掌的動作, 虛擬人物一定會交叉手,因此這裡用於緩解這種現象,無法根除,可以自行根據實際情況調節
4的數值,數值越大,手掌間距越大。只有在手掌位於肩膀寬度範圍內才會生效。
肩膀聯動
肩部聯動補償,主要用於沒有肩部點位的情況下的補償,會自動根據大臂的旋轉角度補償肩膀骨骼旋轉,讓肩部看起來沒有那麼生硬。但是特定行為無法補償,例如聳肩。
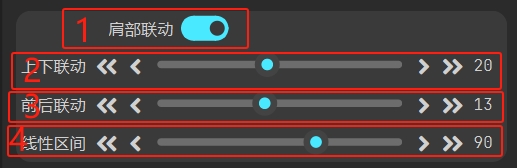
- 是否開啟肩部聯動補償
- 上下聯動補償值,即手臂放下和舉起的聯動補償,補償方向一致
- 前後聯動補償值,即手臂向前和向後的聯動補償,補償方向一致
- 線性補償區間,這裡和 上腿的線性補償區間 同理,一般肩膀補償區間設置為70~90度比較合適,可以自行根據實際情況調節。
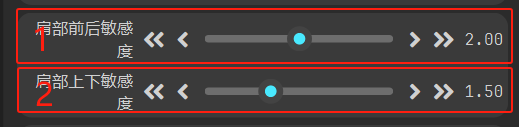
替換部位肩膀敏感度
這裡主要用於將小臂或者手部點位替換到肩膀時的敏感度補償。由於肩膀部位由於綁帶原因,往往傳感器無法完全跟隨肩膀運動,會存在一定的位移,導致角度體現不夠明顯,所以增加靈敏度來補償由於綁帶帶來的差異。如果是緊身衣並且肩膀傳感器完全貼合,那麼將靈敏度設置為1.0。
具體計算邏輯為:作用的旋轉值=檢測的旋轉值 * 靈敏度
其它
用於約束非正常旋轉
胸腰斜歪約束
這裡主要用於糾正綁帶斜外導致的人物側偏問題,站立的情況下會生效,自動修正,但是如果人物側歪著坐下狀態,可能也就進行糾正,那麼人物直立狀態下,就會導致側歪了。注意,弓腰不屬於側歪,側歪是指的向身體兩側斜歪。
糾正是實時緩慢的行為,需要一定時間,並且只有在靜止狀態下會進行糾正。
頭部斜外約束
同胸腰斜外約束,考慮到頭部經常性實際發生側歪行為,容易導致錯誤的糾正行為發生,因此這裡不建議開啟。
腳踝約束
這裡主要約束腳踝的旋轉,一般腳踝相對小腿只有一個方向的自由度,另外兩個放下自由度比較小。考慮大大部分用戶的地板附近磁場條件往往不好,因此會默認開啟腳踝約束,對另外兩個方向進行強行限制,如果用戶地板附近磁場環境良好,比如在戶外土地中,那麼可以關閉腳踝約束獲取更多自由度。
VR胸部校正
胸部校正和胸腰斜歪约束不同,这里仅仅作用于
VR模式,上半身直立和正躺或者趴下的时候生效(侧躺的时候不生效),会调节航向角,强制胸部变直,因此会出现小幅度胸部旋转。站立情况下,是调节自旋转,躺下是调节左右侧歪,仅推荐6轴使用,或者彈簧床上睡覺時使用。