連接
- 點亮要連接的追蹤器
支援的追蹤器組合模式見 上一個章節
- 將接收器插入電腦USB接口中
- 打開 Rebocap 軟體點擊連接
無法連接原因及解決方案
- USB接口有問題,比如部分用戶的電腦USB接口積灰,容易導致連接不穩定。
更換 USB 插口嘗試,或者重新插拔
- 已經啟動了一個
Rebocap客戶端,導致端口被佔用,或者其它程式佔用了端口現象是
連接按鈕可以點擊,但是連接失敗,這個時候需要確保其它Rebocap客戶端完全關閉,建議重新插拔接收器,同時在任務管理器中查找其它Rebocap進程,如果可以找到強制結束 - 確保串口正常,沒有安裝其它模擬串口軟體,部分用戶安裝模擬串口設備以後,將會導致驅動失效
例如安裝了
com0com驅動,需要卸載驅動,然後重新插拔接收器。 確保驅動沒有被更換,這裡可以按照下圖所示操作來回滾接收器串口驅動,如果還不能連接,拔掉接收器重新插入。
連接後無法校準,並且無法修改RGB燈顏色,也可以嘗試回滾驅動
連接後信號弱或者信號不穩定
- 如果使用台式機,請不要將接收器放置在機箱後邊
- 接收器旁邊儘量保持5cm以上空曠區域,比如不要在接收器旁邊插入U盤,如果可以,嘗試延長線也許對信號有一定幫助
校準
穿戴請參考下圖,具體佩戴位置因人而異,原理及細節描述請參考上一章節
[info] 首次使用務必測試15點
如果測試效果不佳,可能有以下原因
動作校準
點擊軟體介面中的 動作校準 按鈕,動作校準參考如下圖,軟體中也有對應的圖片提示,其中要點和動作規範務必全部閱讀。
校準要點
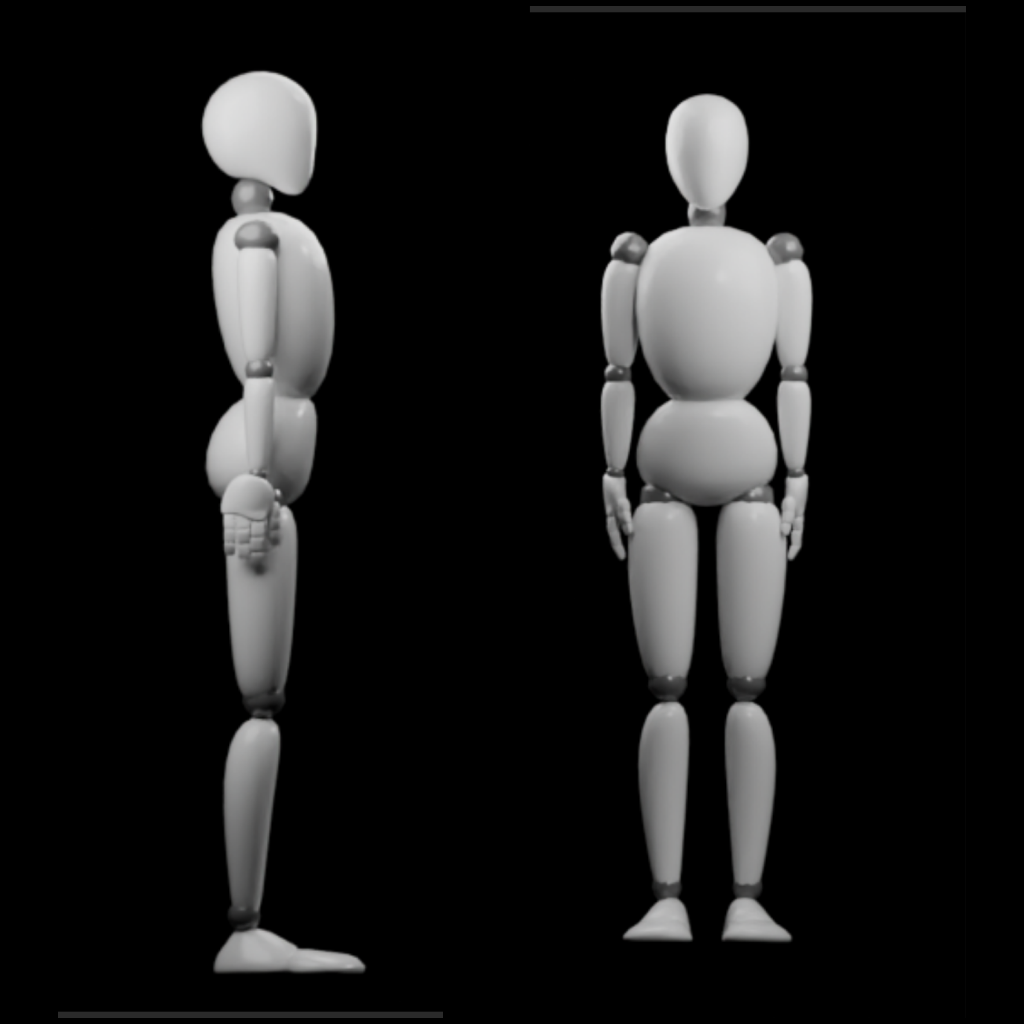
- 點擊動作校準以後,立即進入A-Pose姿態保持靜止
系統會在點擊2秒後開始檢測人物是否處於靜止,注意控制前後晃動幅度,盡最大可能降低晃動,用於完成各個傳感器初始化。檢測時長為10秒,只要檢測到最近2秒內處於靜止,會立即進入校準程序。
- 每個動作在快速滴滴聲期間,系統會錄製對應姿態數據
快速滴滴聲期間務必保持靜止,建議切換動作在快速滴滴聲響完後1秒再開始切換
- 切換動作後請務必保持靜止,等待快速滴滴響起,切換過程建議在2秒內完成
- 切換動作過程一定不能移動雙腳
雙腳在校準期間一定嚴格保持靜止,不要有任何移動。
- 點擊動作校準以後,立即進入A-Pose姿態保持靜止
動作規範
A-Pose
雙腿垂直向下,儘量平行,雙腳之間保持一拳左右間距,雙手繃緊垂直向下,不要彎曲,手心朝向自身,停止脊背,目視正前方
這裡如果大家覺得校準以後雙腳閉合,虛擬人物雙腳交叉了,那麼在校準的時候減小雙腳間距
如果覺得校準以後雙腳閉合,虛擬人物雙腳間距太大,那麼可以在校準的時候增加雙腳間距
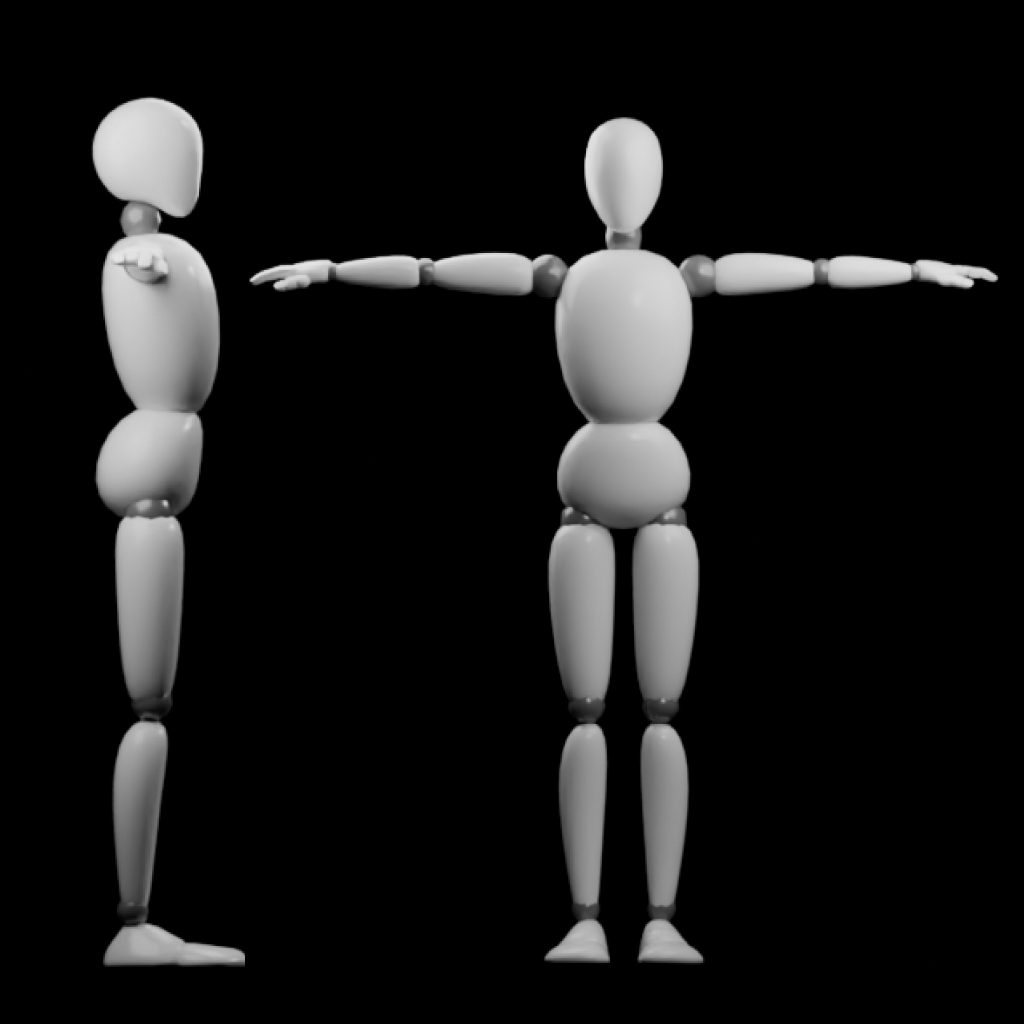
T-Pose
雙腿和A-Pose保持一致,雙手保持向外展開,務必和肩部同寬,且兩隻手在一條直線上,手掌向下
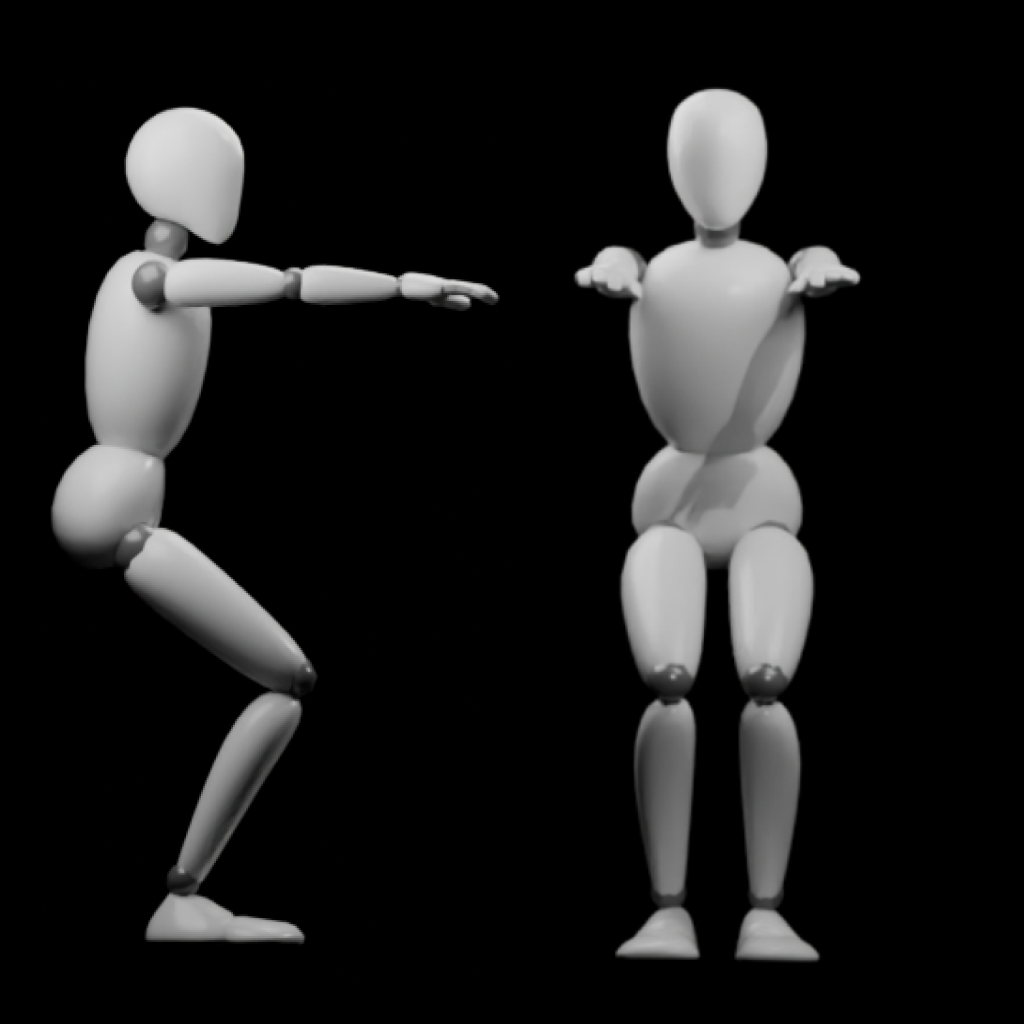
S-Pose
雙腿向正前方微微彎曲約30度即可,不用過度彎曲,雙手保持向前,和上半身垂直,高度平行與肩部,且兩個手臂平行
如果手臂沒有佩戴追蹤器,則手臂的動作可以忽略
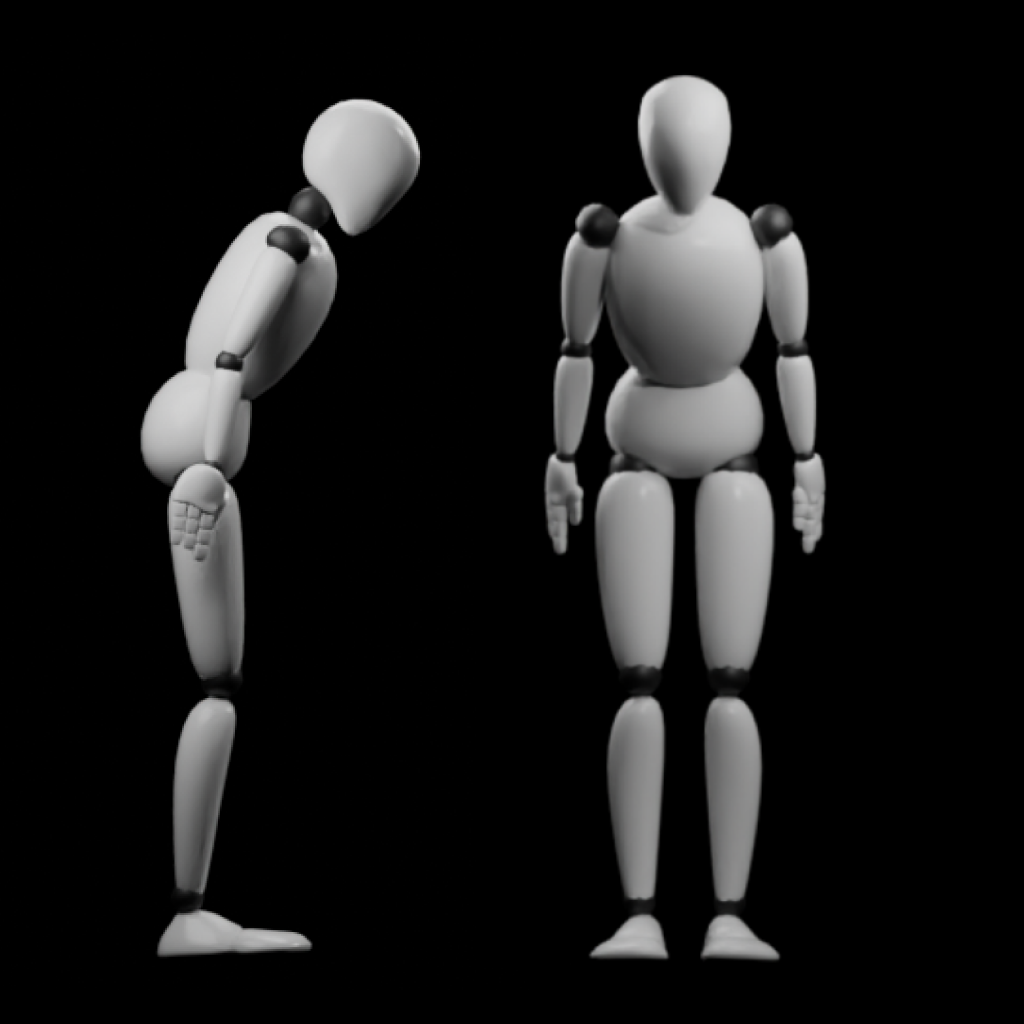
B-Pose
上半身向前彎曲30度即可,手部動作不用管
B-Pose全稱為 Blend-Pose,主要用於校準腰部、胸部、頭部的追蹤器的航向角。
下圖從左往右依次是:APose TPose SPose BPose
軟體接入
SteamVr 接入 請看這裡
- VRChat 接入 請看這裡
- 社群接入教程 https://kdocs.cn/l/crsa6MIP1mOd,若無法連結訪問請下載PDF檔案查看(離線檔案更新可能不及時)
VMC 協議用戶接入 請看這裡
- warudo 接入 請看這裡
抖音直播伴侶接取 請看這裡影片
雲端鏡虛擬直播 存取 請看這裡影片
必須了解項
為了避免使用中遇到的各種問題(比如跟蹤器莫名其妙歪了等問題),也為了您有更好的動捕體驗,請務必閱讀下述說明。
硬體校準
軟體上動捕配置項怎麼設置
- 關於磁場部分配置,請閱讀磁場相關說明
- 其它配置,可以點擊每個配置面板右上角問號圖標
綁帶怎麼綁定最好
如果跳過上一章節閱讀,還請在空閒時間閱讀,或者遇到問題以後務必詳細閱讀
[info]重要點再次強調
這裡再次強調,腳底的跟蹤器綁定方式很關鍵,盡量不要用綁帶,防止跟蹤器因為綁帶和地面摩擦導致影響整體動捕效果,具體請看上一章節說明。