本面板共分為四個小面板, PC VR 面板根據選擇展示
狀態
用於連接接收器和顯示接收器連接狀態
通用校準
用於動作校準以及動作校準時的關鍵參數配置
PC
用於通用 PC 動捕中常用參數配置和控制
VR
用於 SteamVr 下的動捕常用參數配置和控制
狀態面板
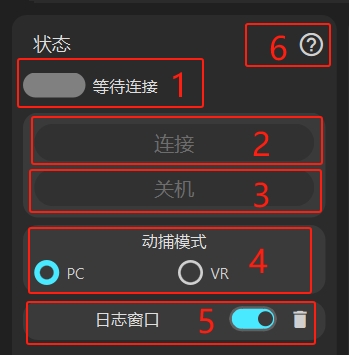
狀態顯示
指示連接狀態,圖標綠色則是已連接
連接按鈕
字體為灰色則表示不可連接,說明接收器沒有插入,字體白色則可連接,如果遇到連接問題,請查看這裡
關機按鈕
點擊全部關機,如果想針對某個傳感器關機,可以打開該傳感器的詳情進行關機(查看這裡),或者直接放到充電盒子中關機(查看這裡)。
動捕模式切換,根據自身使用場景切換
只有用到 SteamVR 的用戶才需要切換為VR場景使用,如果是普通場景使用,比如錄製動畫,或者非VR場景直播,則需要切換到PC模式,注意,如果切換為VR模式,VR未連接,那麼會自動切換未PC模式。
VR 無法連接請查看這裡
日誌開關
3D預覽模式下,開關可用,默認不顯示日誌,右側圖標是清除日誌。如果將3D預覽關閉,則默認展示日誌且不可關閉。
help 文檔按鈕
高級設定開關
開啟以後,所有高級功能會展示,包括:配置的匯出和加載操作、腳底替換為肩膀的功能、兩次拍打感測器的功能、在PC端輸出 Steamvr 虛擬追蹤器能力、通信頻道修改功能、發射信號強度、抗磁強度修改等,使用這些功能前,請務必閱讀相關幫助文檔!!!所有配置的匯出,保存 和恢復預設值
高級功能,謹慎操作,使用的時候建議先匯出備份當前設定!
通用校準面板
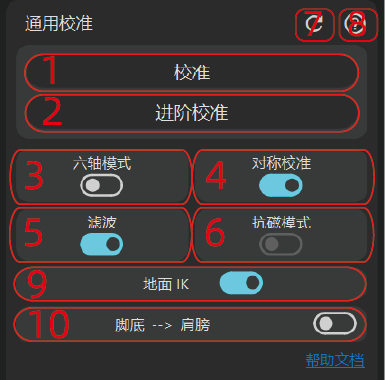
校準按鈕
通用校準,需要擺出三個姿態進行校準,分別是 A-Pose、S-Pose、T-Pose,關於動作要領和校準細節請查看這裡
如果校準失敗,可能是以下原因:
進階校準按鈕
相比於校準按鈕,這裡的新增了 B-Pose,主要用於 頭部、胸部、腰部 節點的航向角校準。其它和
校準功能保持一致六軸模式開關
如果用戶的磁場環境很差,可以打開六軸模式,打開六軸模式之前,建議校準陀螺儀。六軸模式的含義就是,不適用磁力計傳感器數據,因此不會受任何磁場環境干擾,但是帶來的問題就是陀螺儀漂移,具體表現就是長時間使用會導致航向角偏移。
航向角偏移(航向角歪了)具體表現
- 站立的時候歪了,比如胸部,就是自旋轉
- 前傾的時候歪了的表現是,你向著正前方彎腰,結果是向著側前方彎腰
- 躺著的時候,比如腿你是保持和身體一條直線,那麼歪了就是你的腿就是和身體有個水平夾角,比如雙腿都向右歪了。
磁場環境鑑定,請查看這裡
抗磁模式開關
- 對於磁場環境存在個別點位較差的情況,可以開啟抗磁模式
- 如果希望傳感器在身體小幅度晃動時跟隨更快,可以開啟抗磁模式
比如左右晃動的情況下,抗磁模式相比於非抗磁模式會跟隨更快,非抗磁模式在小幅度晃動下,跟隨較慢,但是大幅度下影響不大。
[info]什麼時候關閉抗磁模式
- 對於大幅度跳舞用戶,建議關閉抗磁模式,並且也不建議使用6軸模式,跳舞用戶建議在磁場良好的環境中進行。
當然未來我們也可能會出專業版傳感器,陀螺儀性能更優,可能具備大幅度跳舞模式,不使用磁力計,敬請期待
- 如果整體磁場都很混亂,比如附近有變壓器,或者房間有大喇叭,並且磁場輻射範圍廣,或者在鐵質彈簧床上使用,那麼建議開啟6軸模式。
抗磁開關由跟踪器記憶,也就是每次打開和關閉會將結果存放在跟踪器中,而不是存放於軟件配置中。
濾波開關
用於平滑動作抖動,一般情況下建議開啟,如果發現某個部位抖動還是比較大,檢查如下:
- 先檢查穿戴是否導致抖動,比如跟踪器懸空
- 檢查抗磁等級,一般建議設置為 12,如果發生抖動,請調節會 12 再測試,調節請查看這裡
對稱校準開關
這裡的開關只在校準時刻生效,主要用於消除磁場航向角測量誤差(磁場航向角測量是根據校準動作來測量,校準動作存在誤差,而且磁場本身存在抖動,因此測量也會存在誤差),一般建議開啟【6軸模式會自動關閉】。具體作用是,校準的時候,在同一水平位置下,會對左右兩個跟踪器的航向角取均值,比如左上腿當前站立方向測量航向角為10度,右上腿測量是20度,那麼會採用15度均值。
只有左右雙腿在同一水平高度下,磁場航向方向差異較大,才需要關閉,一般如果同一高度下磁場差異較大,說明磁場環境較差,建議使用6軸。
關於磁場環境鑑定,請查看這裡
reset 按鈕
會重置當前面板的參數為默認參數!後續面板功能相同,不再重複描述!
help 文檔按鈕
地面 IK
用於調節雙腳不平衡問題,比如坐下後,雙腳一隻腳在地面,另一隻腳離地面 2cm 高,同時可以緩解雙腳切換過程中上下震盪問題
腳底替換為肩膀
高級設定,開啟後,腳底會自動替換為肩膀,左腳對應左肩,右腳對應右肩。開啟後,需要打開
AI Engine.配置哪些六軸點位開啟六軸功能
預設六軸模式下,全部開啟六軸功能,取消選擇則該點使用非六軸模式。
PC 面板
此處的設定不影響 VR 使用者,VR 使用者可以跳過此處。

幀緩衝
預設情況下,PC 端會有兩幀緩衝,約 34 ms,緩衝能提升穩定性,例如漂移可能會更小;對於半身使用者,可以關閉,跟隨會更即時。當
AI Engine開啟後,幀緩衝預設不啟用。鏡像模式
左右鏡像,實況主用戶可能會需要,類似照鏡子,左右相反。
AI 引擎
開啟後,人物整體的位移與腳底接觸由
AI模型判定,而不再使用傳統的演算法與策略。PC版本的 AI 引擎支援兩種模型,一種為雙腳佩戴感測器(with foot),另一種為雙腳可不佩戴感測器(no foot)。
若雙腳未佩戴感測器而選擇with foot模型,因該模型需使用雙腳感測器資料,系統會自動切換至no foot;但no foot模式同樣支援雙腳佩戴感測器。位置和朝向以及姿態
慣性動捕原點容易發生漂移,可直接重置原點(即最初的位置),可自行設定重置間隔,預設 0 分鐘,不會自動重置;若設定為
n分鐘,則每n分鐘重置一次人物位移。亦可鎖定人物在水平面上的位移以及垂直面上的位移,這兩項功能常見於直播需求。
可手動調整人物基準位置以及人物的朝向,預設為原點;動畫或直播使用者可利用此功能。例如部分實況主空間狹小,無法面向顯示器擺出
T-Pose,可在完成動作校準後再修改人物朝向。- 位置順序為
x y z,採右手座標系,代表全域位移;x正方向指向螢幕右側,y正方向指向空間上方,z正方向由螢幕內側指向外側,最大值 99.9 公尺;角度代表人物朝向。
- 位置順序為
姿態凍結為實況主所設計,用於固定姿態以處理其他不便事務,避免暴露姿態。開啟開關時,姿態會定格於當下;關閉後恢復至即時動捕狀態。
對外協議輸出
VMC 輸出
VMC 協議使用者會用到;若第三方軟體透過 VMC 協議接入,需開啟 VMC 輸出。
- 關閉後可調整埠號,再重新開啟。
- VMC 縮放主要用於適配人物骨架;若 rebocap 中驅動的人物骨架與目標骨架不一致,可能導致滑步、腳底懸空或腳在地板下等現象,可於此調整以緩解。但若您使用 VRM 模型,強烈建議上傳 VRM 模型並將此處設為 1.0;或若您使用其他模型並希望獲得更佳表現,也建議上傳骨架。骨架可透過 Blender 外掛匯出,詳見 Blender插件使用。
VR 輸出(高級功能)
開啟後,若已連接 SteamVR,會自動輸出虛擬追蹤器至 SteamVR;若需修改追蹤器輸出節點,請暫時切換至
VR面板,修改 VR 輸出配置後再切換回來。此處輸出為目前虛擬骨骼上追蹤點的位置,不受頭顯干擾。
以下為社群提供之無頭顯在 SteamVR 使用說明,官方不承擔任何後果,僅供參考,僅有中文,其它語言版本請自行使用瀏覽器翻譯功能:https://forum.rebocap.site/t/vmt-rebocap/240錄製和離線載入功能
錄製功能
基本使用步驟:開始錄製 → 結束錄製 → 動作匯出。此處可匯出三種格式:fbx、bvh、dae。未來考慮支援
MMD動畫。
其中,fbx6 為傳統 fbx 格式,許多最新的軟體已不支援傳統 fbx 格式。匯出的 FBX 骨架與
Mixamo相容,可直接匯入Blender及其他 3D 軟體。根動畫與新增T-Pose為可選項,預設動捕移動的是骨盆節點;若為根動畫,則移動根節點。另外,若希望動畫開頭為T-Pose預設姿態,可勾選此選項。若您需使用 FBX 製作動畫,請務必使用旋轉訊息,而非匯出 FBX 的骨骼絕對方向。我們日後將邀請社群成員錄製動捕資料並製作動畫教學影片。
離線載入
用途:離線載入並播放
.rebo_anim原始記錄資料。
用法:點擊離線載入,選擇原始記錄檔案,即可開始自動播放動畫,與在線模式相同;可於載入前修改使用者骨架、選擇是否使用IK、是否使用AI Engine等,動捕參數修改即時生效。
播放速度可調整,但會改變 SDK 輸出幀率,目前沒有取樣與插值策略。可暫停播放、開始播放、循環播放等;播放完畢後,播放狀態控制按鈕文字不會變更,若需再次播放,連續點擊播放控制按鈕兩次即可。
錄製動畫為 60 幀率,因此可依時長計算目標幀率;例如希望跳轉至 10.5 秒,即可跳轉至 630 幀。修改幀號後會立即跳轉。[info]使用官方預設數據說明
如果使用者希望了解是否能夠支援自身的軟體,或者希望了解效果,都可以使用離線。目前階段離線數據是一支舞蹈影片,建議提前上傳骨架,修改為AI Engine,使用with foot模式,並開啟Ground IK。
由於錄製數據時,動捕人員將裝置佩戴在腹部而非胯部,因此建議在動捕參數中,IK參數裡,將腰部靈活性修改為 1.3,IK 權重建議設置為 1.4,腿部彎曲修改至 3.5 附近。雙擊校準-胸部
開啟後,雙擊感測器可以觸發功能,胸部雙擊用於重置原點。
注意:雙擊指的是拍打感測器,而不是雙擊感測器的按鈕!不要誤觸按鈕!拍打間隔最長 0.45 秒,最短 0.2 秒,需要一定力度拍打。
雙擊校準-腰部
開啟後,雙擊感測器可以觸發功能,胸部雙擊用於重置原點,腰部雙擊用於觸發 動作校準 功能
VR 面板
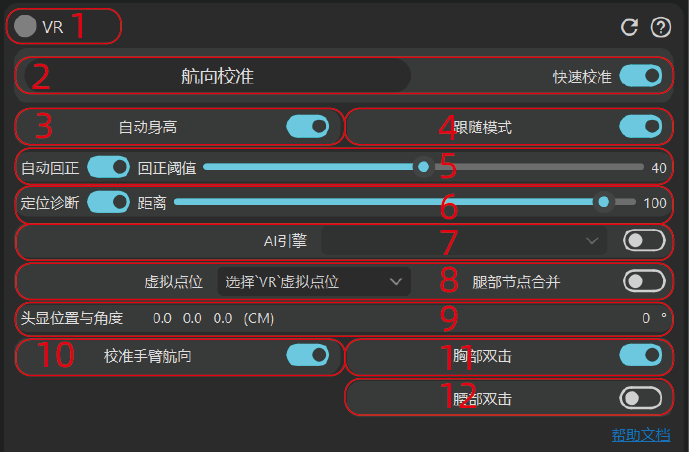
SteamVR 連線狀態指示
如果連線成功,則為綠色;否則代表未連線,無法連線請查看這裡
航向回正
航向回正時,全身務必保持側邊沒有角度,只能繞人體側邊軸向旋轉。比如站立時保持 apose,蹲下時,膝蓋指向正前方;躺下時人的身體呈一直線。這裡航向校準暫時不會對手臂部位生效,後續會考慮加入手臂。
這個功能主要用於航向歪斜後校準,航向歪斜的表現見這裡。如果校準後仍發現歪斜,請考慮以下三個因素:
- 綁帶本身歪了
- 安全區域未關閉,請關閉一體機安全區域
- 使用類似 vrc toolkit 修改了航向角,需要重設為 0
這裡的快速跳過開關主要用於縮短航向校準時間;未開啟時,系統會預留提示時間,開啟後則不會預留提示時間。
頭顯位置信息
這裡會顯示頭顯位置,單位為 CM;第二個數據是高度,最右側是頭顯自身的俯仰角。
防止腳滑
關閉防止腳滑時,身體點位驅動將完全依照頭顯的位置,不會有腳底固定在地面。因此在預設模式下,一定會出現腳滑現象;若身體骨骼與現實保持一致可稍微緩解。
另外,當人物的腳底高度大於約 20 cm,內部計算也會自動切換到預設模式。開啟防止腳滑後,腳底會強制黏住地板;在非快速動作下,表現更自然,一般建議非激烈舞蹈使用。
地面碰撞 IK
用於調節雙腳不平衡問題,例如坐下後,一隻腳在地面,另一隻腳離地面 2 cm 高,同時可以緩解雙腳切換過程中的上下震盪問題
自動回正功能
此自動回正功能會在使用者全身靜止約 1 秒後觸發。回正閾值指的是目前姿態與跟隨模式(也就是完全依照頭顯定位)姿態下,虛擬追蹤器的距離;當存在追蹤器距離大於回正閾值時,會觸發回正。因此如果閾值很低,會頻繁回正,表現為追蹤器時常發生小幅度瞬移。
回正後,追蹤器會立即回正到跟隨模式下的位置。因此如果發現回正結果不佳,可以切換到跟隨模式查看,可能是航向角本身歪斜或綁帶本身歪斜所致。
胸|腰 跟隨頭顯
預設情況下,如果「防止腳滑」開關開啟,那麼所有節點位置將由頭顯和腳底的位置共同決策。若此處的開關開啟,胸部和腰部的節點位置將只由頭顯的位置決定。
虛擬點位
這裡可控制顯示哪些虛擬追蹤器,可自行配置。例如預設手臂會開啟,可以點擊此處取消手臂點位。如果開啟 VRC 模式,則會將大腿與小腿的感測器合併並放置到膝蓋位置;玩家可依實際情況選擇是否開啟。開啟 VRC 模式不一定在 VRC 中表現更好;此選項主要是將虛擬追蹤器放到更符合 VRC IK 計算的點位,但並不代表效果一定更佳。VRC IK 受多種因素影響,例如虛擬骨骼是否與真人一致等。
關機自動隱藏
將未使用的感測器自動隱藏。但有一特殊情況:如果使用腿部節點合併功能,則腳底感測器會豁免隱藏。
腿部節點合併
將大腿與小腿的虛擬感測器合併到膝蓋關節。這也是 VRC 預設推薦的感測器關節位置,但並不代表在 VRC 內部效果更佳!
定位診斷
此功能用於輔助判斷追蹤器定位效果。開啟後,系統會複製一組新的虛擬追蹤器,位置在自身正前方,距離單位為 cm,可透過滑動條調節距離。若要看到虛擬追蹤器,建議切換到 SteamVR 預設場景中查看!第三方軟體如 Reborn 或 VRC,在非特殊模式下一般看不到虛擬追蹤器。
虛擬地面高度
主要用於解決:去高出地面的臺階(例如穿上)使用,或者下到比地面低的臺階使用,虛擬地面還是按照原始地面計算,導致效果不佳。其他情況也可以根據實際設定,比如部分玩家,可能將虛擬地面高度設定到地面以上(3~5 cm)附近,IK 解算空間更大,整體效果會更好一些。
AI 引擎
開啟 AI 引擎後,可支援 5 點動捕:腳踝佩戴兩點(建議在腳踝上方約 5 cm 處)、大腿佩戴兩點、腰部佩戴一點,這是最少點位佩戴要求。其他點位可依實際情況自行佩戴;若未佩戴,則會使用 AI 模型預測腳底與胸部節點的方向。
「原地行走 & 替換位置」功能開關
這兩個功能都是 rebocap 插件採用攔截 steamvr 內部手柄控制器的方式實現,對於官方串流工具例如
steam link、pico connect等沒有影響,但是對於 VD 串流(VirtualDesktop),會導致 VD 串流無法從手柄狀態切換到手指追蹤狀態。此功能每次開啟或者關閉,都需要重新啟動 SteamVR 才會生效。如果此功能關閉,則無法使用 原地行走 以及 替換控制器 位置功能。
原地行走功能編輯區
此功能必須要求開啟功能開關,也就是上方的「原地行走 & 替換位置」功能開關。此功能的作用是原地行走時,會劫持控制器的搖桿數據(可以自行選擇左手搖桿還是右手搖桿),透過原地踏步的形式,模擬產生搖桿數據,從而達到透過原地踏步讓遊戲中的人物行走的目的;此功能可以相當程度地緩解使用搖桿控制行走時的暈眩現象(具有一定的大腦皮層欺騙性)。原地踏步期間,預設朝向正前方行走,對應的搖桿可以控制行走方向,例如可以後退;原地踏步的速度可以透過調節行走倍率來調控,同時自身踏步的角速度也會直接影響前進速度。
預設情況下,原地踏步功能開啟以後,對應的手柄控制器的搖桿功能會失效,但我們增加了一個開關,在未檢測到原地踏步時,恢復搖桿功能,但可能容易導致暈眩。
校準手臂航向角
開啟後,如果手臂的節點打開,點擊航向校準時,會同時矯正手臂的航向角度。建議在航向校準期間,手臂對稱放置,自然貼著腋下即可(與胸部大約保持 10~25 度角度),可自行感受校準效果來調整手臂位置。
替換控制器位置
此功能必須要求開啟功能開關,也就是上方的「原地行走 & 替換位置」功能開關。開啟後,如果同時開啟兩隻手的輸出節點,則會使用 rebocap 追蹤器的點位覆蓋到手柄控制器的輸出點位上,此過程要求手柄控制器保持連線狀態。此功能核心作用是:可以解決手柄控制器在 HMD 頭顯視覺盲區時的定位丟失現象。
注意,部分手柄控制器的射線角度與手柄方向不一致,此時需要修改
data/replace_controller_angle.txt檔案,調整控制器補償角度。例如pico的手柄控制器需要修改為 25(對應的作用就是向前旋轉 25 度),可依據 Tpose 時手柄的朝向進行調整。每次修改後,需重新切換本功能開關才會生效。胸部雙擊(高級功能)
開啟後,雙擊胸部感測器,用於觸發 航向校準 功能。
注意:雙擊指的是拍打感測器,而不是雙擊感測器的按鈕!不要誤觸按鈕!拍打間隔最長 0.45 秒,最短 0.2 秒,需要一定力度拍打。另外,睡覺期間存在誤觸發的可能,建議關閉。
腰部雙擊(高級功能)
用法同 胸部雙擊,雙擊後,觸發 動作校準 功能。
VR 自動身高
已經遷移至骨架部分,預設開啟;此處的自動身高是根據頭顯的高度推算個人身高。但頭顯的身高測量容易受到個人環境影響,且與頭顯測量精度相關。目前的身高計算方式為:height = headset * 1.05。
也就是說,在校準時低頭、抬頭都會影響身高測量。一般情況下,盡量將身高測量誤差控制在 ±3 cm 以內較佳;若誤差較大,請考慮校準頭顯與地面的高度。
[danger] 測量誤差說明
高度測量誤差較大,與 rebocap 設備沒有任何關係,也與 rebocap 軟體本身無關;rebocap 只是讀取頭顯的高度,再乘以 1.05 的係數推算出身高。如果誤差較大,通常是一體機高度測量誤差所導致!!!
一體機測量誤差通常可透過校準地面高度來解決;若仍有較大誤差,可能是周邊環境影響(一般一體機測量主要依賴攝影機看到的環境來進行測量)。嘗試在房間中較為空曠的場地進行測量,或可有所緩解。