连接
- 点亮要连接的跟踪器
支持的跟踪器组合模式见 上一个章节
- 将接收器插入电脑USB接口中
- 打开 Rebocap 软件点击连接
无法连接原因及解决方案
- USB接口有问题,比如部分用户的电脑USB接口积灰,容易导致连接不稳定。
更换 USB 插口尝试,或者重新插拔
- 已经启动了一个
Rebocap客户端,导致端口被占用,或者其它程序占用了端口现象是
连接按钮可以点击,但是连接失败,这个时候需要确保其它Rebocap客户端完全关闭,建议重新插拔接收器,同时在任务管理器中查找其它Rebocap进程,如果可以找到强制结束 - 确保串口正常,没有安装其它模拟串口软件,部分用户安装模拟串口设备以后,将会导致驱动失效
例如安装了
com0com驱动,需要卸载驱动,然后重新插拔接收器。 确保驱动没有被更换,这里可以按照下图所示操作来回滚接收器串口驱动,如果还不能连接,拔掉接收器重新插入。
连接后无法校准,并且无法修改RGB灯颜色,也可以尝试回滚驱动
连接后信号弱或者信号不稳定
- 如果使用台式机,请不要将接收器放置在机箱后边
- 接收器旁边尽量保持5cm以上空旷区域,比如不要在接收器旁边插入U盘,如果可以,尝试延长线也许对信号有一定帮助
校准
穿戴请参考下图,具体佩戴位置因人而异,原理及细节描述请参考上一章节
[info] 首次使用务必测试15点
如果测试效果不佳,可能有以下原因
动作校准
点击软件界面中的 动作校准 按钮,动作校准参考如下图,软件中也有对应的图片提示,其中要点和动作规范务必全部阅读。
校准要点
- 点击动作校准以后,立即进入A-Pose姿态保持静止
系统会在点击2秒后开始检测人物是否处于静止,注意控制前后晃动幅度,尽最大可能降低晃动,用于完成各个传感器初始化。检测时长为10秒,只要检测到最近2秒内处于静止,会立即进入校准程序。
- 每个动作在快速滴滴声期间,系统会录制对应姿态数据
快速滴滴声期间务必保持静止,建议切换动作在快速滴滴声响完后1秒再开始切换
- 切换动作后请务必保持静止,等待快速滴滴响起,切换过程建议在2秒内完成
- 切换动作过程一定不能移动双脚
双脚在校准期间一定严格保持静止,不要有任何移动。
- 点击动作校准以后,立即进入A-Pose姿态保持静止
动作规范
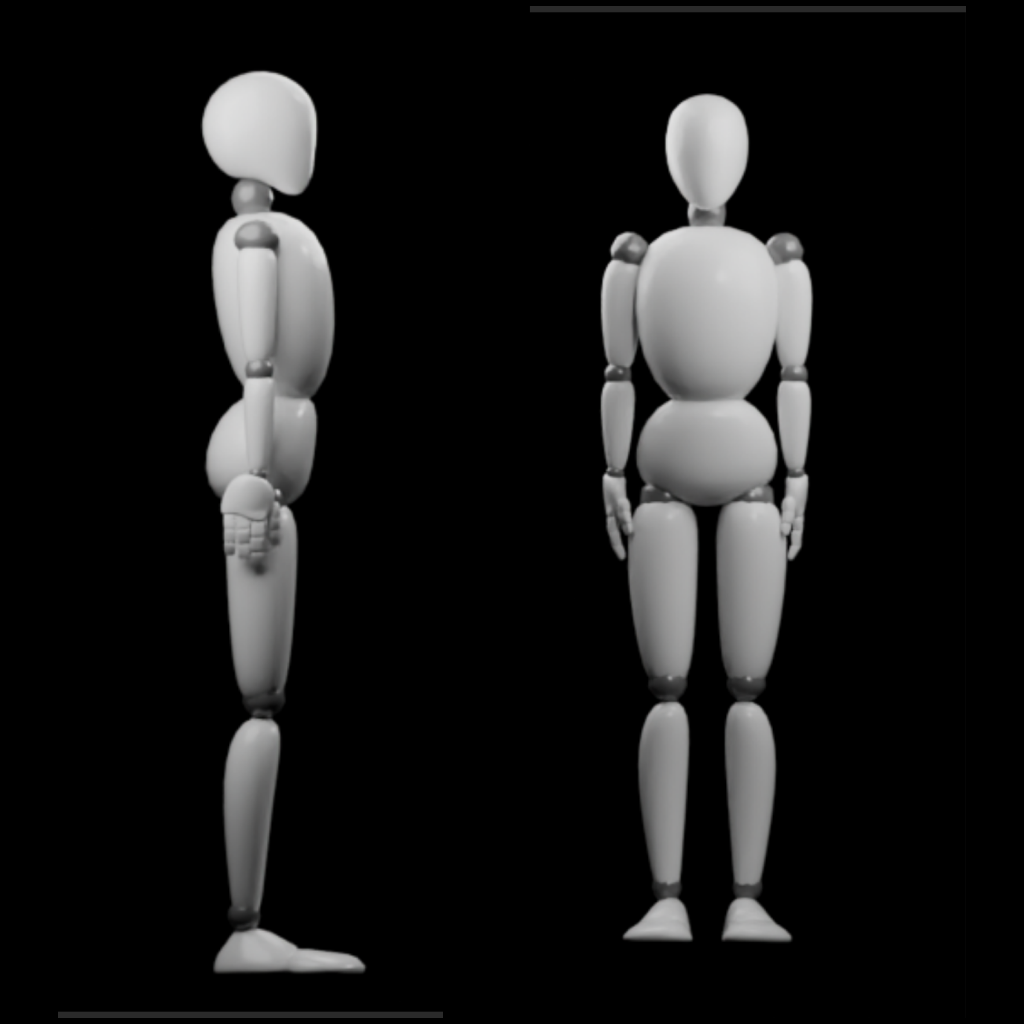
A-Pose
双腿垂直向下,尽量平行,双脚之间保持一拳左右间距,双手绷紧垂直向下,不要弯曲,手心朝向自身,停止脊背,目视正前方
这里如果大家觉得校准以后双脚闭合,虚拟人物双脚交叉了,那么在校准的时候减小双脚间距
如果觉得校准以后双脚闭合,虚拟人物双脚间距太大,那么可以在校准的时候增加双脚间距
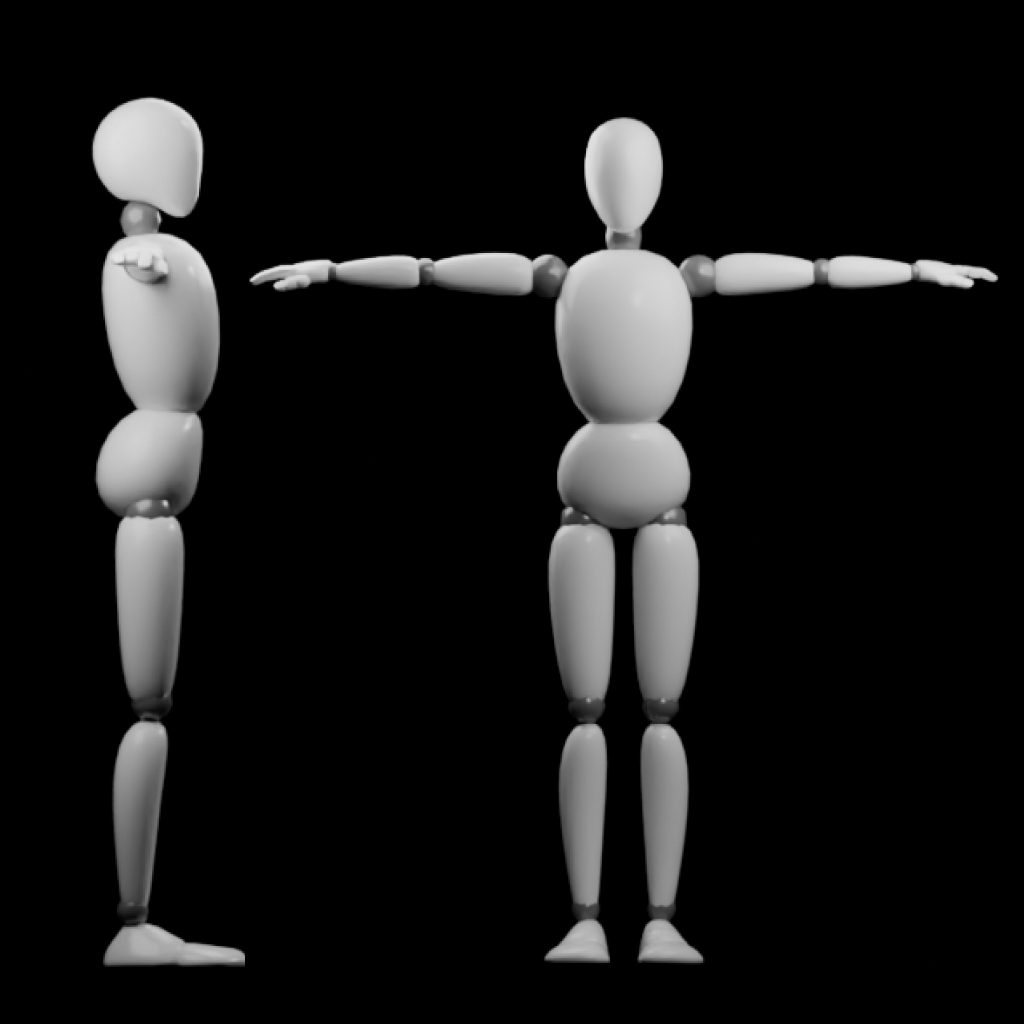
T-Pose
双腿和A-Pose保持一致,双手保持向外展开,务必和肩部同宽,且两只手在一条直线上,手掌向下
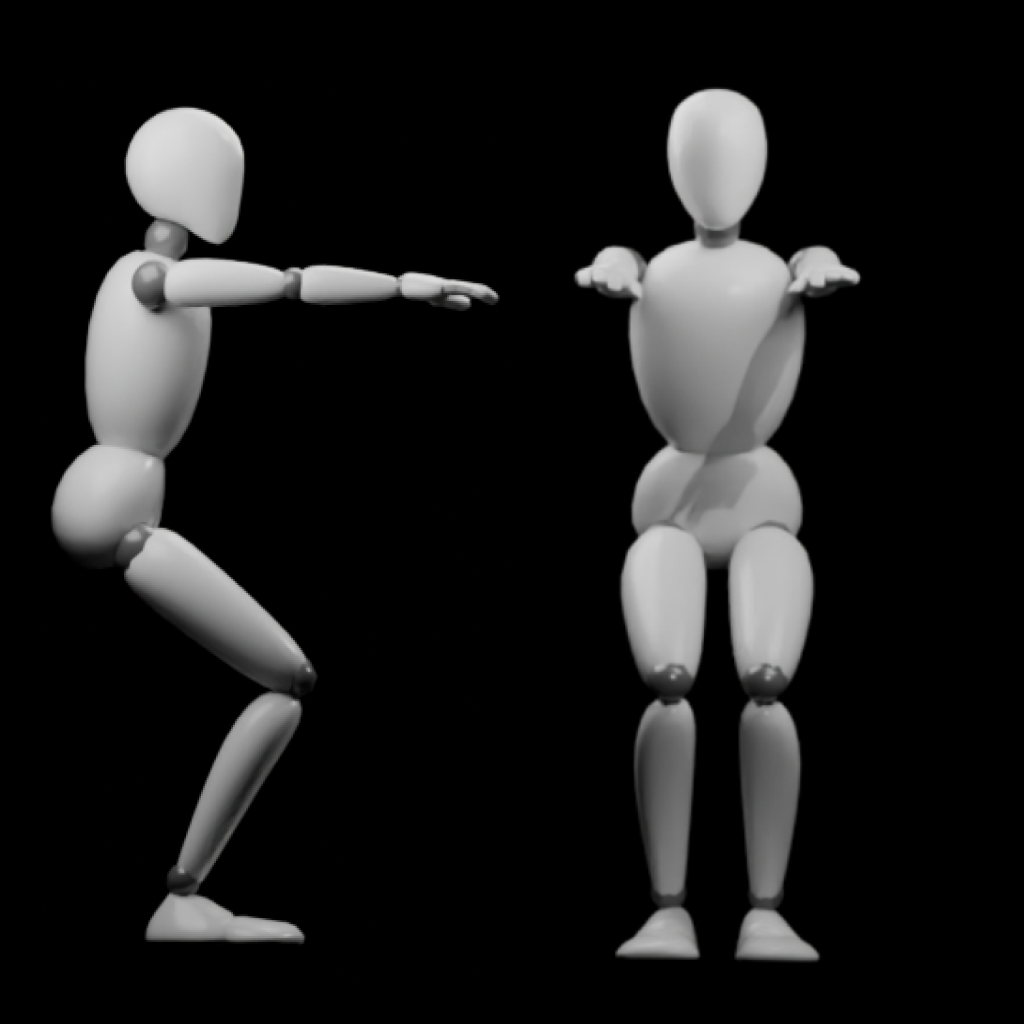
S-Pose
双腿向正前方微微弯曲约30度即可,不用过度弯曲,双手保持向前,和上半身垂直,高度平行与肩部,且两个手臂平行
如果手臂没有佩戴跟踪器,则手臂的动作可以忽略
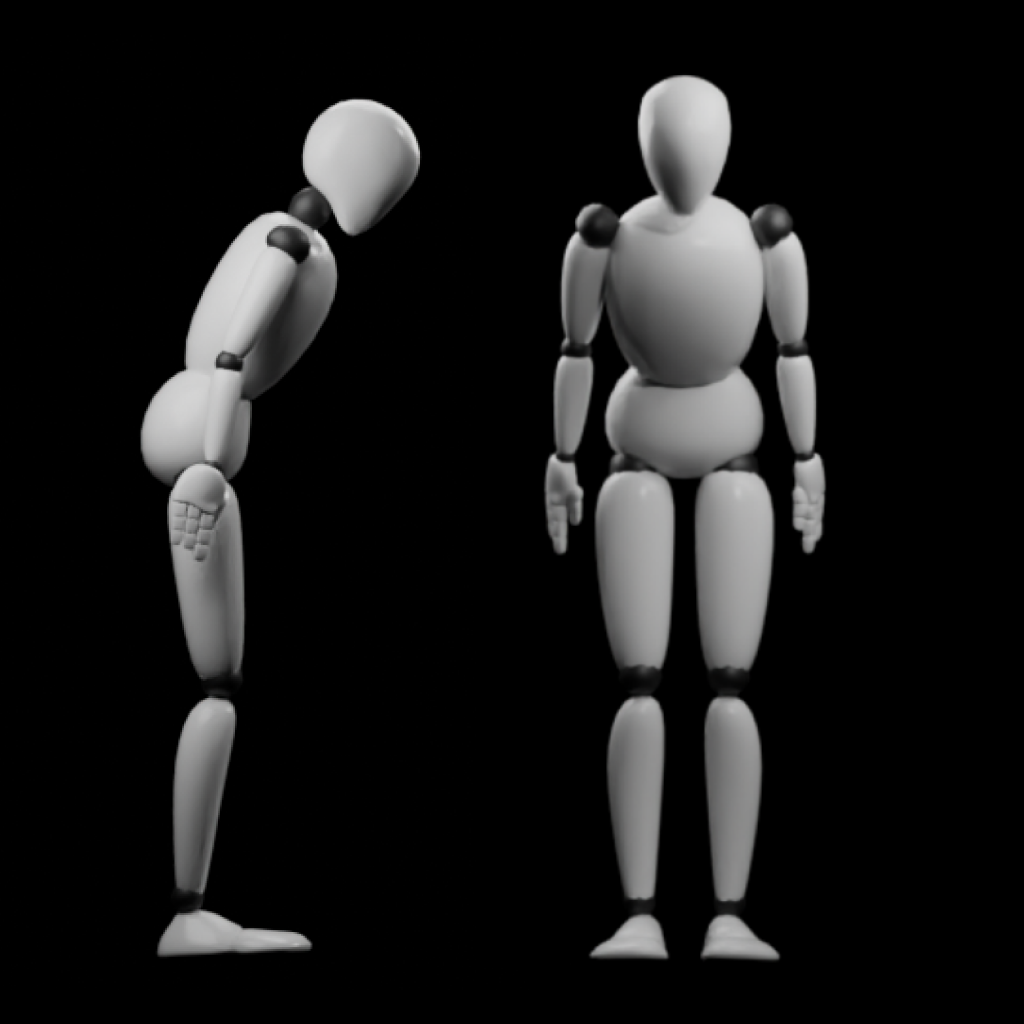
B-Pose
上半身向前弯曲30度即可,手部动作不用管
B-Pose全称为 Blend-Pose,主要用于校准腰部、胸部、头部的跟踪器的航向角。
下图从左往右依次是:APose TPose SPose BPose
软件接入
SteamVr 接入 请看这里
- VRChat 接入 请看这里
- 社区接入教程 https://kdocs.cn/l/crsa6MIP1mOd,如果无法链接访问请下载PDF文件查看(离线文件更新可能不及时)
VMC 协议用户接入 请看这里
抖音直播伴侣接入 请看这里视频
云镜虚拟直播 接入 请看这里视频
必须了解项
为了避免使用中遇到的各种问题(比如跟踪器莫名其妙歪了等问题),也为了您有更好的动捕体验,请务必阅读下述说明。
硬件校准
软件上动捕配置项怎么设置
- 关于磁场部分配置,请阅读磁场相关说明
- 其它配置,可以点击每个配置面板右上角问号图标
绑带怎么绑定最好
如果跳过上一章节阅读,还请在空闲时间阅读,或者遇到问题以后务必详细阅读
[info]重要点再次强调
这里再次强调,脚底的跟踪器绑定方式很关键,尽量不要用绑带,防止跟踪器因为绑带和地面摩擦导致影响整体动捕效果,具体请看上一章节说明。