上腿补偿

应用补偿
开启后应用补偿功能,这里的补偿主要用于补偿因为肉体形变或者绑带拉扯带来的形变。
校准时自动计算
根据S-Pose时的形变量来计算,如果需要更好的效果,建议坐下以后调节,使用手动调节,由于穿戴位置变化或者绑带因为摩擦力而导致受力不均,可能每次自动校准的结果也会有所不同。
侧偏补偿
- 这里的补偿,主要是用于补偿坐下或者躺下因为肉体形变而带来的侧歪现象,不用补偿磁场带来的问题,一般肉体形变带来的问题往往比较对称,这里的补偿同时作用于左上腿和右上腿。
- 如果需要手动调节,可以坐下后打开3d预览窗口调节,不建议VR下看着自身的跟踪器调节。
- 部分情况的偏移可能是磁场导致,请查看这里
[info]注意!!!
建议用户先找到最佳绑定位置后再调节补偿,补偿值越小越好。 测试绑定位置的时候建议不要穿长裤,建议绑带直接贴着皮肤表面测试(个别人员如果对绑带毛面过敏,可以垫一张纸巾)。从目前结果反馈,部分人放在双腿的外侧面效果好,部分人放在膝盖正上方位置效果好,请以最终测试结果为准!
关闭补偿,然后充分测试最佳绑定位置以后,再开启启动补偿机制更好。
高低补偿
- 主要用于补偿坐下后高低腿问题,比如坐下后左腿比右腿高,需要更好效果建议坐下后手动调节,调节到双脚高度相同即可。
- 造成高低腿有两个原因
- apose校准时,两只腿的角度不一致(左右腿长度差异容易导致这种现象),比如左腿膝盖用力往后,而右腿膝盖微微向前,这时就容易高低腿
- 两只腿肌肉分布差异较大,也容易造成高低腿现象
旋转补偿
- 旋转补偿的补偿机制和高低补偿类似,只是高低补偿是用于将双腿补偿到相同数值,旋转补偿则是针对双腿应用相同的角度。
- 坐下后补偿,补偿值越大,人物屁股位置会越高
为什么需要这个补偿:主要是人体肉体组织呈现一定流动性,容易受重力影响,特别是佩戴在正面,传感器和骨骼的相对校对会发生变化。比如你坐下以后,上腿是和地面平行的,屁股和膝盖高度一致,但是你如果仔细观察虚拟人物,会发现虚拟人物的屁股可能低于虚拟人物膝盖,这个时候就可以调节补偿值保持和现实接近一致了。
线性区间
补偿的计算逻辑,比如补偿值是10,线性区间设置为25度,那么当大腿相对于Apose时微微弯曲,那么弯曲的角度是12.5度的时候,给出的补偿值就是5,如果弯曲的角度是25度,给出的补偿值就是10,弯曲90度,给出的补偿值还是10。大部分情况线性区间是25~45度。可以根据自行情况调节。
上腿默认夹角
这里主要是修改校准时刻真人上腿相对于地面的夹角,默认只垂直向下,夹角为0。这里的功能是方便有一定的 X 型腿或者 O 型腿,或者校准的时候习惯于双腿间距较远用户。
数值越大,虚拟人物双腿越分散,注意,这里和侧偏补偿不同,这里的调节,站立情况下也会生效。对于小腿,按照经验,调节为大腿的一半即可。
下腿补偿
功能和上腿补偿一致,具体用法参考上腿补偿,但是需要注意,坐下的时候下腿相对于Apose 姿态下,偏转角度很小,所以一般无需在坐下的时候补偿,下腿弯曲向后以及躺下可以查看补偿效果。

IK、肩部及其它补偿
IK 参数
当前的IK主要用于重新计算腿部,增加腿部稳定性,从而增加整体稳定性。
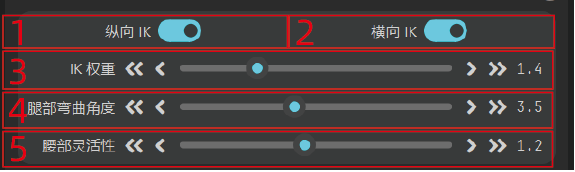
纵向 IK 开关
开启以后,会尽可能降低人物上下起伏抖动,但是目前无法完全避免,未来离线优化可能能应对这种情况。
横向 IK 开关
开启以后,如果人物双脚不动,双腿和腰部有角度活动,虚拟人物双脚会尽可能保持同时静止。否则,会因为骨架不同等,导致只有一只脚静止,另一只脚小范围活动。
IK 权重
IK 权重越高,IK 干预力度越大,越小则越趋向于原始的角度,并且IK调节角度增量的速度也会更慢,可以和关闭 IK 对比效果出入。
腿部弯曲角度
增加腿部弯曲程度,IK解算范围更大,整体更稳定,但是代价是腿部默认会弯曲,一般调节到 3~4 附近即可。
腰部灵活性
数值越大,腰部运动会越灵活,但是可能和现实运动有出入,酌情调节。
手臂约束参数
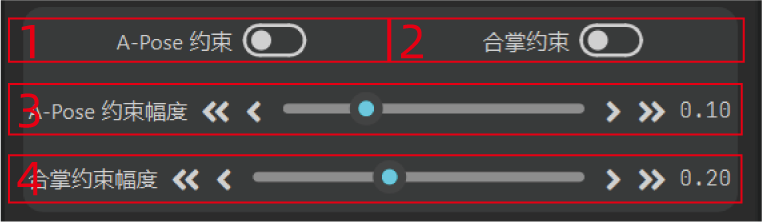
A-Pose 约束
主要用于约束 A-Pose 手臂不要贴近身体,这里主要是考虑到主播用户的需求,很多主播模型肩膀太窄,如果手臂和现实人物保持一致,就会明显穿模。可以按照图中
3标识,调节手臂约束范围,值越大,手臂越远离身体。合掌约束
主要用于调节鼓掌的时候交叉手,因为很多 虚拟人物 手臂很长,现实人物鼓掌的动作, 虚拟人物一定会交叉手,因此这里用于缓解这种现象,不能根除,可以自行根据实际情况调节
4的数值,值越大,手掌间距越大。只有在手掌位于肩膀宽度范围内才会生效。
肩膀联动
肩部联动补偿,主要用于没有肩部点位的情况下的补偿,会自动根据大臂的旋转角度补偿肩膀骨骼旋转,让肩部看起来没有那么生硬。但是特定行为无法补偿,例如耸肩。
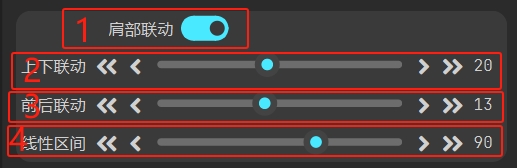
- 是否开启肩部联动补偿
- 上下联动补偿值,即手臂放下和举起的联动补偿,补偿方向一致
- 前后联动补偿值,即手臂向前和向后的联动补偿,补偿方向一致
- 线性补偿区间,这里和 上腿的线性补偿区间 同理,一般肩膀补偿区间设置为70~90度比较合适,可以自行根据实际情况调节。
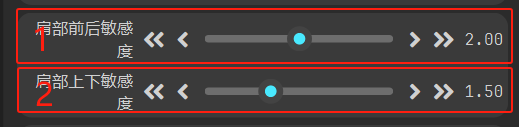
替换部位肩膀敏感度
这里主要用于将小臂或者手部点位替换到肩膀时的敏感度补偿。由于肩膀部位由于绑带原因,往往传感器无法完全跟随肩膀运动,会存在一定的位移,导致角度体现不够明显,所以增加灵敏度来补偿由于绑带带来的差异。如果是紧身衣并且肩膀传感器完全贴合,那么将灵敏度设置为1.0。
具体计算逻辑为:作用的旋转值=检测的旋转值 * 灵敏度
其它
用于约束非正常旋转
胸腰斜歪约束
这里主要用于纠正绑带斜外导致的人物侧偏问题,站立的情况下会生效,自动修正,但是如果人物侧歪着坐下状态,可能也就进行纠正,那么人物直立状态下,就会导致侧歪了。注意,弓腰不属于侧歪,侧歪是指的向身体两侧斜歪。
纠正是实时缓慢的行为,需要一定时间,并且只有在静止状态下会进行纠正。
头部斜外约束
同胸腰斜外约束,考虑到头部经常性实际发生侧歪行为,容易导致错误的纠正行为发生,因此这里不建议开启。
脚踝约束
这里主要约束脚踝的旋转,一般脚踝相对小腿只有一个方向的自由度,另外两个放下自由度比较小。考虑大大部分用户的地板附近磁场条件往往不好,因此会默认开启脚踝约束,对另外两个方向进行强行限制,如果用户地板附近磁场环境良好,比如在户外土地中,那么可以关闭脚踝约束获取更多自由度。
VR胸部纠偏
胸部纠偏和胸腰斜歪约束不同,这里仅仅作用于
VR模式,上半身直立和正躺或者趴下的时候生效(侧躺的时候不生效),会调节航向角,强制胸部变直,因此会出现小幅度胸部旋转。站立情况下,是调节自旋转,躺下是调节左右侧歪,仅推荐6轴使用,或者弹簧床上睡觉时使用。