磁場環境が良好かどうかを判断する方法
モーションキャプチャデバイスにとって、核心となるのは磁場の方向(特に方位)の一貫性です。方位とは地表に平行な方向、すなわち東西南北の方向を指します。
時には、磁場の干渉が比較的小さい場合でも、方向に小さな角度の影響を与えることがあります。また、特定のエリアで干渉が非常に強い場合でも、コンパスの指向に影響を与えないことがあります。例えば、干渉源の磁場の方向が地面に垂直である場合や、地球の磁場の方向と重なる場合です。
したがって、すべての測定は方向を基準とし、磁場の強弱は補助的な判断手段です。また、異なる緯度では地球の磁場の大きさが異なります。南北極に近づくほど磁場の強度は大きく、赤道に近づくほど磁場の強度は小さくなります。したがって、一部のブロガーが動画で言及している磁場の強弱を参考にすることは、基本的に参考になりません。なぜなら、あなたと彼らの緯度が大きく異なる可能性があるからです。例えば、中国の北京の地磁場の強度は約55uT、中国の深圳は約35uTです。また、磁場は地理的環境の影響も受けるため、磁場の強度情報は一般的に参考程度にとどめてください。異なる地域の磁場強度には比較の意味がなく、同じ部屋内の磁場強度のみが比較可能です!
磁場環境の干渉源
| 干渉源 | 干渉の程度 |
|---|---|
| 磁石 | 非常に強い、近づかないでください |
| 鉄器 | 大きさに依存し、大きいほど干渉が強い。例えば、テーブルに鉄のネジを使用している場合、約30cm離れる必要があります |
| 304ステンレス | 原則として磁性を持たないが、製造工程の制約により、ある程度の干渉があり、大きさにも依存します。鉄器の干渉程度の約1/5です |
| ワイヤレス充電 | コイル付近の干渉が非常に強く、特に充電中は強い |
| コンピュータ | スピーカー付近の干渉が非常に大きい |
| 携帯電話 | 携帯電話のスピーカー、近づくと干渉が大きい |
| ルーター | 基本的に干渉はありませんが、重りの鉄塊がある場合を除く |
| マウス | 基本的に干渉はありませんが、重りの鉄塊がある場合を除く |
| VRコントローラー | 通常30cm以内に干渉があります |
| ヘッドセット | 通常は30〜40cm離れると干渉はありませんが、一部のヘッドセットデバイスを除く、例えばpico4pro |
| 220V家庭用ケーブル付近 | 電流が大きい場合に干渉があります |
| スピーカー | 干渉が非常に大きいので、できるだけ離れてください! |
| ヘッドセット | 干渉が非常に大きいので、できるだけ離れてください! |
| Bluetoothイヤホン | Bluetoothは磁場に干渉しませんが、イヤホンのマイクが干渉します! |
| 木製テーブル | 接続部に鉄のネジを使用している場合、明らかな干渉がありますが、他の場所には干渉はありません |
| 電源タップ | 通電電流の大きさによって、電流が大きいほど干渉が大きい |
| 電子レンジ | 干渉が非常に大きく、基本的にオンにすると広範囲に明らかな干渉があります! |
| 温水暖房ボイラー | 金属に鉄元素が混ざっており、通常1メートル以内に干渉があります |
| 壁 | 鉄筋構造の耐荷重壁または耐荷重柱の場合、0.5メートル以内に明らかな干渉があります |
| 床 | 大部分の床には一定の干渉があります(木製の床は表面のみで、内層には鉄筋構造があります) 床の表面付近には一定の干渉があり、鉄筋の材質に依存します。部分的な床は10cm以上の高さで基本的に干渉がなく、部分的には60cm以上、さらには100cm以上必要な場合もあります |
以上の情報は参考用です!具体的には実際の測定に基づいてください!
物理コンパスを使用した測定
物理コンパスを使用して、複数のポイントで測定を行い、磁場の方向を確認し、物理コンパスの針の方向の一貫性を確認します。物理コンパスを大きな長方形の紙箱の上に置くことをお勧めします。これにより、コンパス自体の方向の一貫性をできるだけ確保し、コンパスの針の度数の差異を読み取ることで、磁場環境の良し悪しを判断できます。
良好な磁場環境では、各ポイントの方向が一貫しています。床の近く10〜20cmの高さでのみ磁場の方向が一致しない場合でも、他の方向が一致していれば、磁場環境は良好と見なされます。(当社のソフトウェアは足首に方向制約を設けているため、足部センサーの磁場干渉を免疫できます)。
しかし、大腿の高さと腰部の磁場センサーの方向が一致しない場合、座った後に腰部が小角度で回転することがあり、これが一般に「歪んだ」と言われる現象です。(ここでは、抗磁アルゴリズムを使用していない場合、または6軸作業モードではない場合を指します)
一般的に、方向の差が5度以内であれば、磁場の一貫性は比較的良好と考えられますが、具体的にはユーザーの仮想骨格の方向に対する感度に依存します。
電子コンパスを使用した測定
ここでは、携帯電話のコンパスを使用した測定についてのみ紹介します
携帯電話のコンパスは物理コンパスに比べて相対的に精度が低く、携帯電話のコンパスも校正が必要です。携帯電話のコンパス測定でも、携帯電話を大きな長方形の紙箱の上に置くことをお勧めします。これにより、携帯電話自体の方向が変わって読み取りに影響を与えるのを防ぎます。具体的な測定と測定結果の説明については、物理コンパスを使用した測定を参照してください。
[danger]携帯電話のコンパス使用上の注意事項
携帯電話アプリのコンパスは、初回起動時にのみ磁場センサーのデータを採用し、その後はジャイロスコープを使用してコンパスを維持します。そのため、どんな磁場干渉があっても、コンパスは常に一方向を指し続けます。
正しい測定方法は、各ポイントを測定した後にコンパスプロセスを終了し、再度コンパスアプリを開くことです!
携帯電話センサー記録アプリを使用した測定
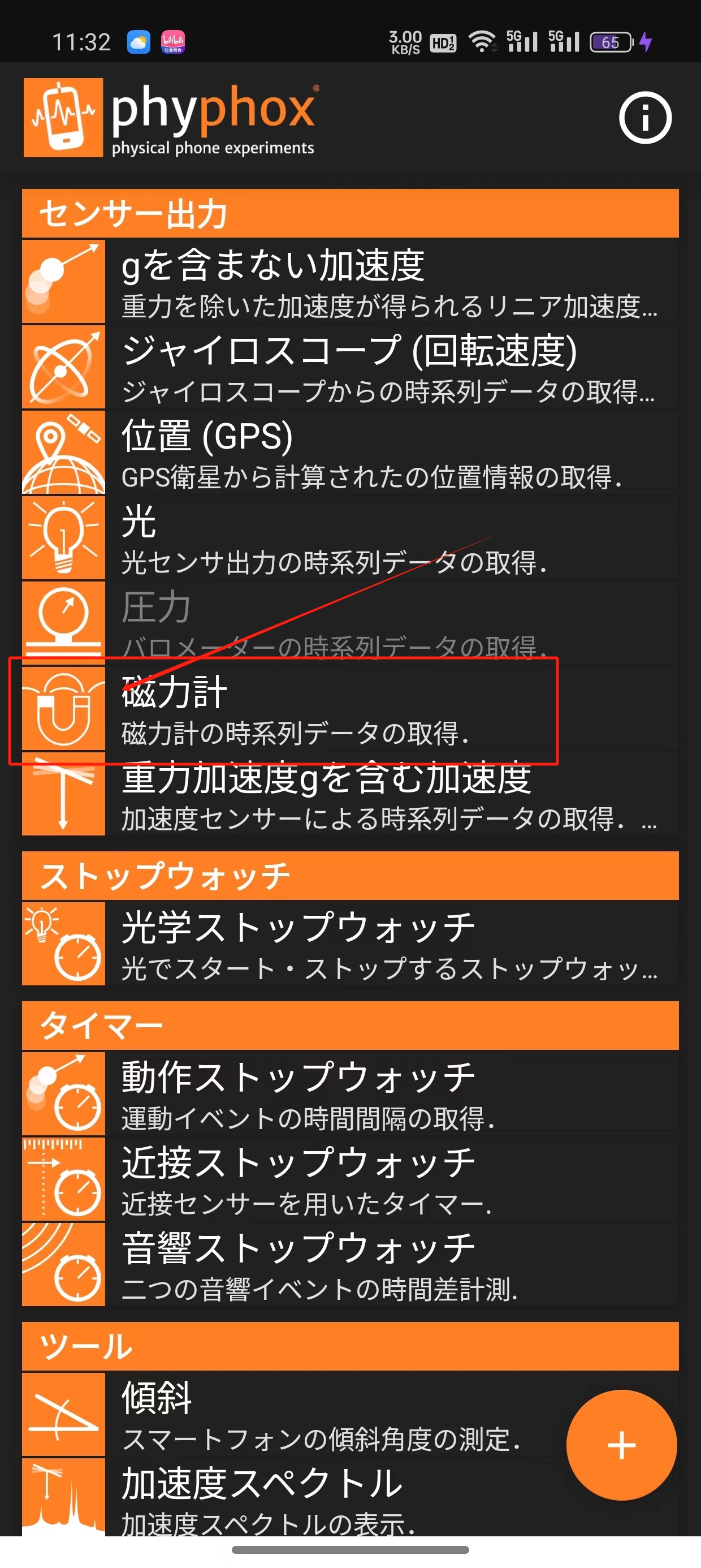
phyphoxアプリをダウンロードして測定することをお勧めします。ここに中国語版Android版ダウンロードを提供します。 または公式サイトからダウンロードすることもできます。
アプリをインストールした後、下図の操作に従って記録を開始します。その後、各位置の三軸磁場の大きさを記録しながら移動します。必ず携帯電話の方向が常に一定の方向を指すようにしてください!!! 大きな四角形の紙箱の上に置くと、携帯電話の方向の一貫性をより確保しやすくなります。

結果として三本の曲線が平坦であれば(携帯電話が各位置間で平行移動したことを確認し、一つのポイントで静止している平坦さには意味がありません)、磁場環境は良好です。そうでない場合は、磁場の方向を慎重に診断する必要があります。ここでは、異なる高さを同時に測定することをお勧めします。
[info]Tip
このタイプの三軸磁場の継続的な記録方法は、個人の動きの影響を受けやすく、移動中に向きが変わりやすいため、方向の変化が突起を引き起こすことがあります。このため、この方法は一般的には推奨されません。特定のユーザーが測定中に自分の向きを頻繁に変える場合、その測定結果は参考価値がありません!!!
rebocapセンサーを使用した測定
rebocapセンサーは磁場校正後、測定精度が各種スマートフォンよりも高いため、rebocapデバイスがある場合はrebocapセンサーを使用して測定します。センサーの一つを充電ボックスに入れ、充電接点を上に向け、特定のノードを選択してそのノードの3D回転を確認できます。
同時に、抗磁モードを必ずオフにしてください。そうしないと測定結果が無効になります!!!
その後、各ポイントで立方体ボックスの方向の一貫性を確認します。すべてが一致している場合、磁場環境は良好です。そうでない場合、非抗磁モードで使用する場合、対応する測定ポイントの近くで仮想身体骨格が偏向することがあります。
また、rebocapの磁場校正済みセンサーを使用して磁場強度の測定を行うこともできます(校正が必要かどうかの判断はこちらを参照)。異なる干渉源の干渉程度を測定します。【校正後のrebocapセンサーは、携帯電話を使用した測定よりも磁場強度の測定精度が高い】。
磁場校正が必要かどうかの識別方法
全体的な定性的な確認
すでに装着して点灯している場合、ハードウェア情報リストで磁場強度を確認できます。一般的に、全体の強度が一貫している場合はすべて緑色で表示され、平均値の範囲を大きく超える場合は黄色や赤色で表示されます。そのため、特に黄色や赤色のノードに注意を払い、単一ノードの検出を行います。
ただし、一部の地域で干渉源が非常に大きい場合もあります。この場合は、干渉源から離れて再テストすることができます。
もう一つの判断方法は、同じ高さで左右のトラッカーの磁場強度が一致しているかどうかです。地面から頭部まで、一般的に磁場強度の変化は一貫しています。例えば、両足の底が35、小腿が39付近、大腿が45付近、胸部と腰部が46付近であれば、これは環境要因によるものであり、磁場の偏移ではありません。
以上の判定方法はすべて定性的な判断です。校正が必要かどうか、具体的には次のセクションを参照してください。
単一ノード検出
ノードを開いて磁場強度を確認し、空間内のある地点aを見つけ、その地点aに移動します。センサーのスイッチを押して再起動した後、a地点を中心に3軸をゆっくりと回転させ、磁場強度の変化を観察します。例えば、6つの面をそれぞれ上に向けて1秒間停止し、磁場強度を確認します。もし磁場強度が完全に一致する場合は校正は不要ですが、そうでない場合は校正が必要です。
相対的な磁場強度を確認することもできます。変化範囲が0.1以内であれば、通常は再校正は不要です。しかし、心配な場合は磁場校正を行い、校正後の磁場強度の一貫性が向上するかどうかを確認してください。
[info]原理説明
磁場に偏りがある場合、センサーが異なる方向にあるときに磁場の大きさが一致しません。例えば、x軸が15uT偏っていると仮定すると、磁場の方向がx軸と一致している場合、磁場の大きさは45uTです。このとき、磁場がx軸の正方向と同じ方向であれば測定値は60uT、逆方向であれば測定値は30uTになります。偏りがない場合、測定結果はすべて45uTになります。
しかし、部屋の磁場強度には常にいくらかの干渉があり、特定の部屋内の磁場は小さな範囲で変動することがよくあります。そのため、測定中に1〜3uT程度の変化があるのは正常であり、平均値を基準に観察してください。
[warning]Tip
検出する空間の地点は干渉源から遠ざける必要があります。コンピュータから半メートル以上離れ、空間のある地点を中心に回転してください。
抗磁モードの選択方法
抗磁モード選択
how to choose magnet mode
```
耐磁モードの選択
その他のよくある質問
寝た後に胸部や腰部がすべて歪んでしまった
6軸モードを使用している場合、これは長時間のドリフトが原因です。ノードを胸部から移動させ、呼吸による上下動を避けることで、アルゴリズムがジャイロドリフトを抑制できます。
抗磁モードを使用している場合、横になった後に相対磁場の大きさが長時間1.0付近にない場合、実質的にセンサーは6軸モードで動作しています。
抗磁モードを使用しているが、座ると腰部に微小な曲がりがある
抗磁モードでは、主に磁場強度に基づいて6軸を使用するか磁力計を使用するかを選択します。磁場強度がほぼ一定であっても、立っているときと座っているときに角度が微小に偏る場合、抗磁アルゴリズムはそれを識別できないため、小さな角度の偏りが残ることがあります。この問題を解決するために6軸モードを検討し、磁力計を使用しないでください。
抗磁アルゴリズムは、特定のポイントで磁場が悪いが、大部分のエリアや使用時間で磁場環境が良好な場合に主に効果を発揮します。例えば、ハンドルがセンサーに近づいたときや、短時間でコンピュータの前に移動したときに抗磁の効果が非常に顕著です。しかし、微小な角度の磁場誤差や磁場強度がほぼ一定の場合、抗磁アルゴリズムは現在良好な識別ができません。更新をお待ちください。