接続
- 接続するトラッカーの電源を入れる
サポートされているトラッカーの組み合わせモードについては 前の章 を参照してください
- レシーバーをコンピュータのUSBポートに挿入する
- Rebocapソフトウェアを開いて接続をクリックする
接続できない理由と解決策
- USBポートに問題がある場合、例えば一部のユーザーのコンピュータのUSBポートにほこりがたまり、接続が不安定になることがあります。
別のUSBポートを試すか、再接続してください
- すでに1つの
Rebocapクライアントが起動しているため、ポートが占有されているか、他のプログラムがポートを占有している現象は
接続ボタンがクリック可能ですが、接続に失敗します。この場合、他のRebocapクライアントが完全に閉じていることを確認し、レシーバーを再接続することをお勧めします。また、タスクマネージャーで他のRebocapプロセスを探し、見つかった場合は強制終了してください - シリアルポートが正常であることを確認し、他の仮想シリアルポートソフトウェアがインストールされていないことを確認してください。一部のユーザーは仮想シリアルポートデバイスをインストールすると、ドライバが無効になることがあります
例えば
com0comドライバをインストールした場合、ドライバをアンインストールし、レシーバーを再接続する必要があります。 ドライバが変更されていないことを確認してください。以下の図に示す手順でレシーバーのシリアルポートドライバをロールバックできます。接続できない場合は、レシーバーを抜いて再接続してください。
接続後にキャリブレーションができず、RGBライトの色を変更できない場合も、ドライバのロールバックを試みてください
接続後の信号が弱いまたは不安定
- デスクトップPCを使用している場合は、レシーバーをケースの後ろに置かないでください
- レシーバーの横にはできるだけ5cm以上の空間を保ち、例えばレシーバーの横にUSBメモリを挿入しないでください。可能であれば、延長ケーブルを試すと信号に一定の助けになるかもしれません
キャリブレーション
装着については以下の図を参照してください。具体的な装着位置は人によって異なります。原理や詳細については前の章を参照してください。
[info] 初めて使用する場合は必ず15ポイントをテストしてください
テストの結果が良くない場合、以下の理由が考えられます
- 磁場の問題。具体的な解決策についてはこちらを参照してください
- ジャイロスコープのキャリブレーションが必要な場合があります。詳細についてはこちらを参照してください
- 装着の引っ張り問題についてはこちらをよく読み、参照してください
動作キャリブレーション
ソフトウェアのインターフェースにある動作キャリブレーションボタンをクリックし、動作キャリブレーションの参考として以下の図を参照してください。ソフトウェア内にも対応する画像のヒントがあります。重要なポイントと動作の規範は必ずすべて読みましょう。
キャリブレーションの要点
- 動作キャリブレーションをクリックした後、すぐにA-Poseの姿勢を保持し、静止する
システムはクリックから2秒後に人物が静止しているかどうかを検出し始めます。前後の揺れ幅を注意深く制御し、揺れを最小限に抑えて、各センサーの初期化を完了します。検出時間は10秒で、最近の2秒間に静止していると検出されると、すぐにキャリブレーションプログラムに入ります。
- 各動作は、速いビープ音の間に、システムが対応する姿勢データを録音します
速いビープ音の間は必ず静止していることを維持し、動作を切り替える際は速いビープ音が鳴り終わった後1秒待ってから切り替えることをお勧めします
- 動作を切り替えた後は必ず静止し、速いビープ音が鳴るのを待ち、切り替えの過程は2秒以内に完了することをお勧めします
- 動作を切り替える際には必ず両足を動かさないこと
両足はキャリブレーション中に必ず静止を厳守し、動かさないでください。
- 動作キャリブレーションをクリックした後、すぐにA-Poseの姿勢を保持し、静止する
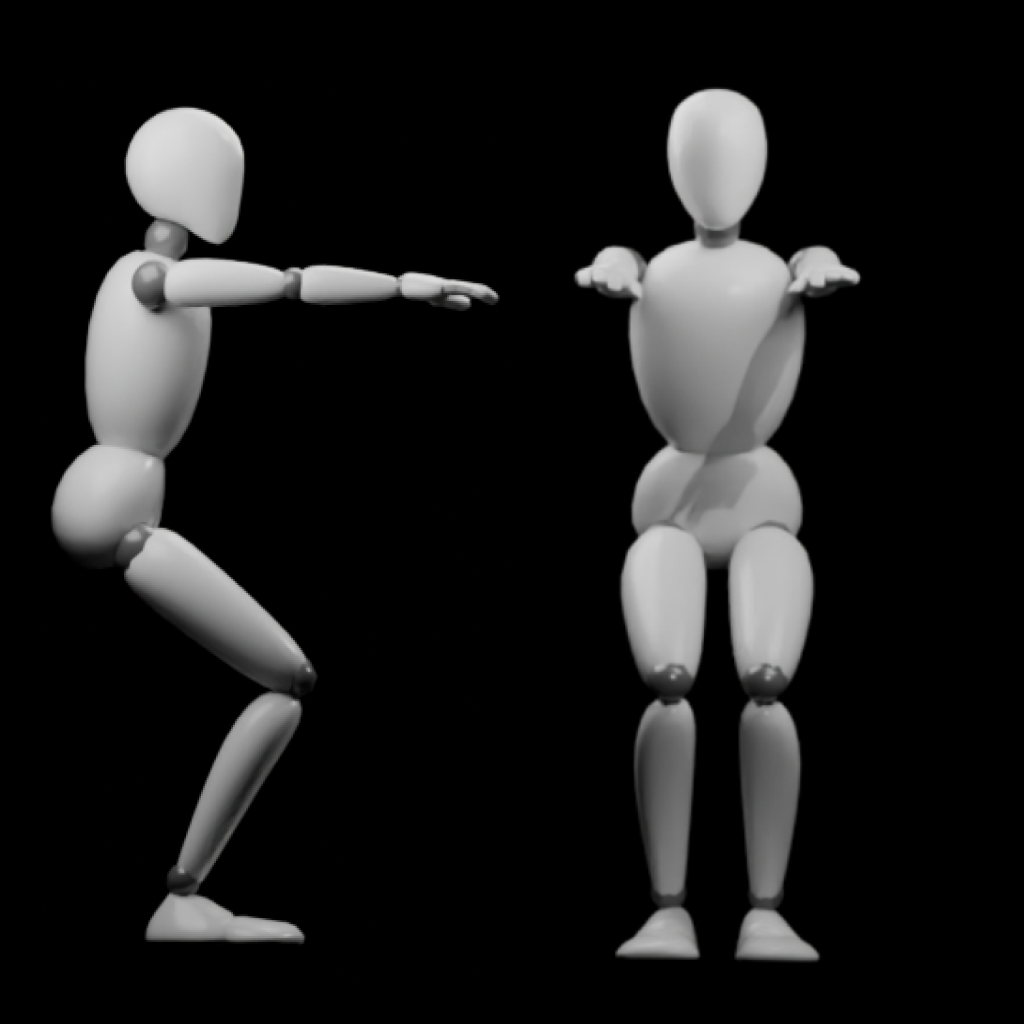
動作の規範
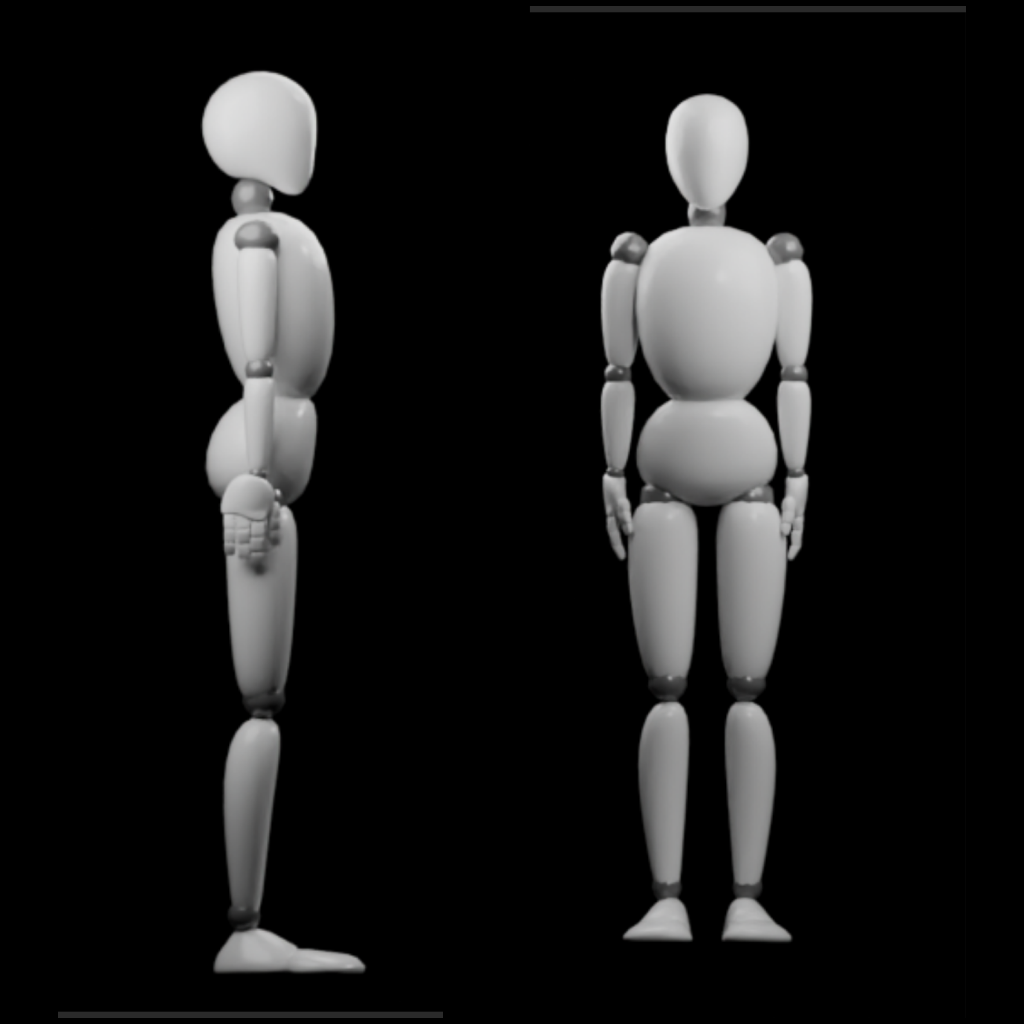
A-Pose
両足を垂直に下に向け、できるだけ平行にし、両足の間に拳1つ分の距離を保ち、両手を緊張させて垂直に下に向け、曲げずに手のひらを自分に向け、背中をまっすぐにし、正面を見つめる
ここで、キャリブレーション後に両足が閉じていると感じる場合、仮想キャラクターの両足が交差している場合は、キャリブレーション時に両足の間隔を狭めてください
キャリブレーション後に両足が閉じていると感じ、仮想キャラクターの両足の間隔が広すぎる場合は、キャリブレーション時に両足の間隔を広げてください
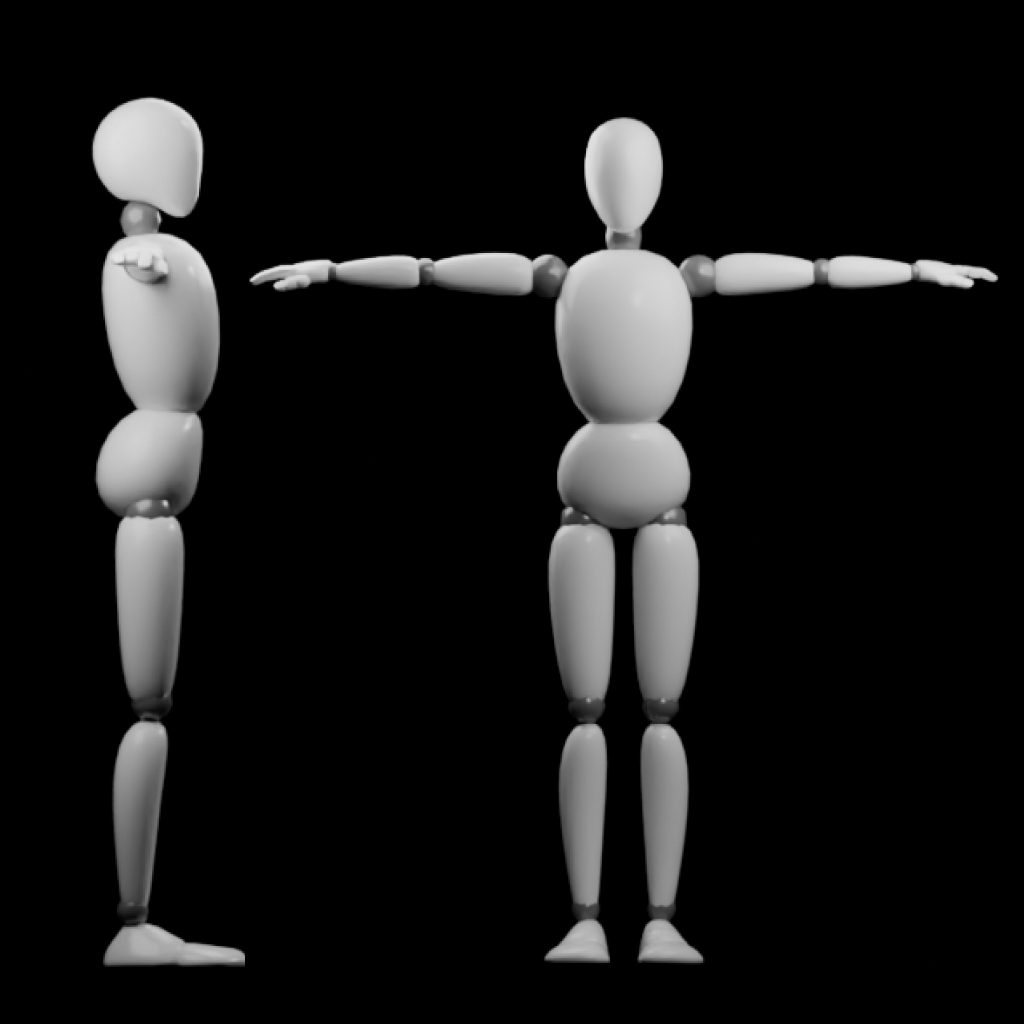
T-Pose
両足はA-Poseと同じに保ち、両手は外側に広げ、必ず肩幅と同じにし、両手が一直線になるようにし、手のひらを下に向ける
S-Pose
両足を前方に約30度軽く曲げるだけで、過度に曲げる必要はありません。両手は前方に保ち、上半身と垂直にし、高さは肩と平行にし、両腕は平行にします
腕にトラッカーを装着していない場合、腕の動作は無視できます
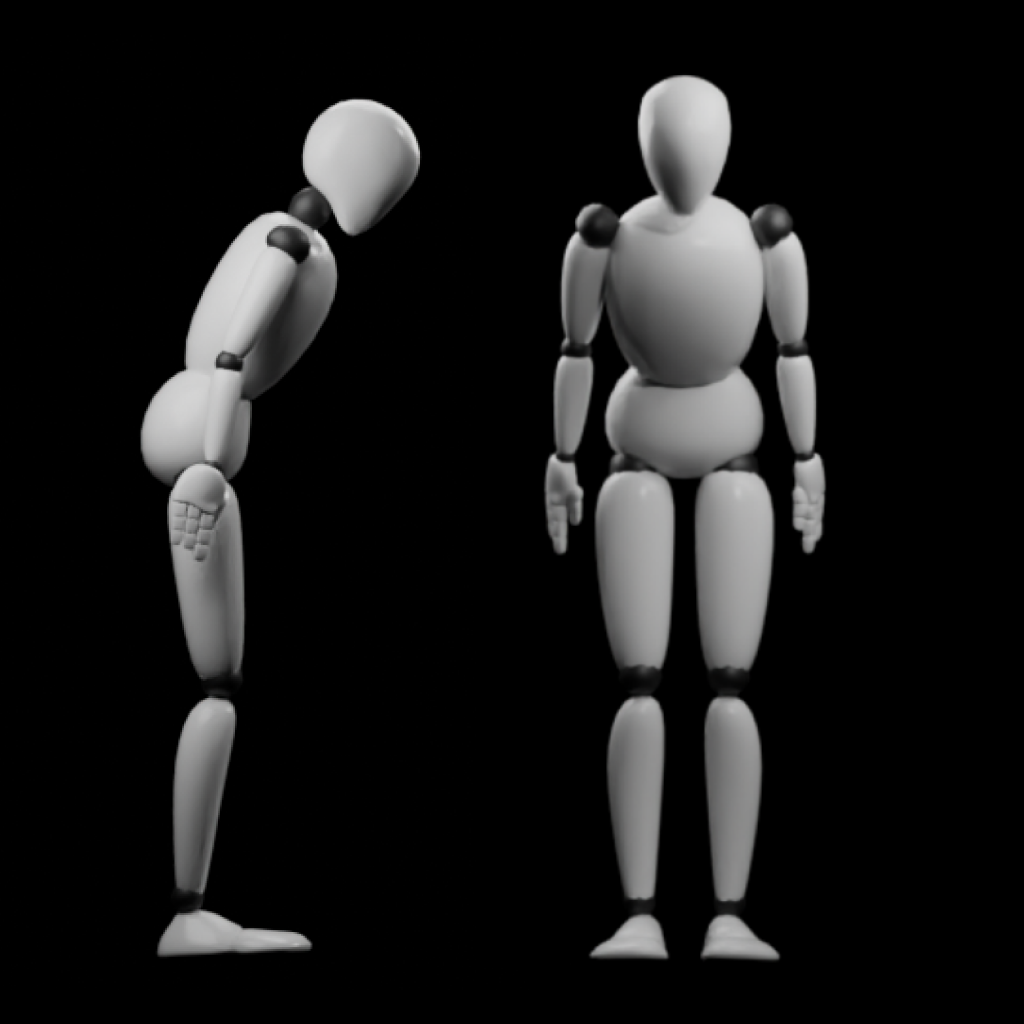
B-Pose
上半身を前方に30度曲げるだけで、手の動作は気にしなくて大丈夫です
B-Poseの正式名称はBlend-Poseで、主に腰、胸、頭のトラッカーの航向角をキャリブレーションするために使用されます。
下図の左から右への順番は:APose TPose SPose BPose
ソフトウェア接続
SteamVr 接続 こちらをご覧ください
- VRChat 接続 こちらをご覧ください
- コミュニティ接続チュートリアル https://kdocs.cn/l/cnOltEt3BgQP,リンクにアクセスできない場合はPDF ファイルをダウンロードしてご覧ください(オフラインファイルは最新でない場合があります)
VMC プロトコルユーザー接続 こちらをご覧ください
- warudo 接続 こちらをご覧ください
必須事項
使用中に発生する様々な問題(例えばトラッカーが突然傾くなど)を避けるため、またより良いモーションキャプチャ体験を得るために、以下の説明を必ずお読みください。
ハードウェアキャリブレーション
ソフトウェアでのモーションキャプチャ設定方法
- 磁場に関する設定については、磁場関連の説明をお読みください
- その他の設定については、各設定パネルの右上のクエスチョンマークアイコンをクリックしてください
ストラップの最適な取り付け方法
前の章を飛ばして読んだ場合は、空いている時間にお読みいただくか、問題が発生した際には必ず詳細にお読みください
[info]重要点の再強調
ここで再度強調しますが、足底のトラッカーの取り付け方法は非常に重要です。ストラップを使用しないようにし、ストラップと地面の摩擦によってトラッカーが動き、全体のモーションキャプチャ効果に影響を与えないようにしてください。詳細は前の章の説明をご覧ください。