このパネルは4つの小パネルに分かれており、PC VR パネルは選択に応じて表示されます。
状態
レシーバーの接続と接続状態の表示に使用されます
共通キャリブレーション
動作キャリブレーションおよびキャリブレーション時の重要なパラメータ設定に使用されます
PC
一般的なPCモーションキャプチャでよく使われるパラメータ設定と制御に使用されます
VR
SteamVRでのモーションキャプチャの一般的なパラメータ設定と制御に使用されます
状態パネル
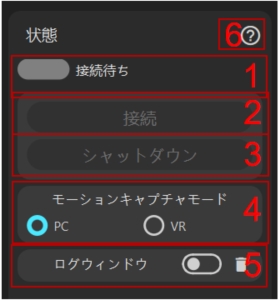
状態表示
接続状態を示し、アイコンが緑色の場合は接続されています
接続ボタン
フォントが灰色の場合は接続不可を示し、レシーバーが挿入されていないことを意味します。フォントが白色の場合は接続可能です。接続問題が発生した場合は、こちらを参照してください
電源オフボタン
すべての電源をオフにします。特定のセンサーをオフにしたい場合は、そのセンサーの詳細を開いてオフにすることができます(こちらを参照してください)、または充電ボックスに入れてオフにすることもできます(こちらを参照してください)。
モーションキャプチャモードの切り替え
使用シーンに応じて切り替えます。SteamVRを使用するユーザーのみがVRシーンに切り替える必要があります。通常のシーン、例えばアニメーションの録画や非VRシーンのライブ配信の場合は、PCモードに切り替える必要があります。注意:VRモードに切り替えた場合、VRが接続されていないと自動的にPCモードに切り替わります。
VRが接続できない場合はこちらを参照してください
ログスイッチ
3Dプレビューのモードでは、スイッチが使用可能で、デフォルトではログは表示されません。右側のアイコンはログをクリアします。3Dプレビューを閉じると、デフォルトでログが表示され、閉じることはできません。
ヘルプドキュメントボタン
高度な設定スイッチ
有効にすると、すべての高度な機能が表示されます。これには、設定のエクスポートとロード操作、足元を肩に置き換える機能、センサーを2回タップする機能、PC側での Steamvr 仮想トラッカー機能の出力、通信チャンネルの変更機能、信号強度の送信、磁気耐性の調整などが含まれます。これらの機能を使用する前に、必ず関連するヘルプドキュメントをお読みください!!!すべての設定のエクスポート、保存、およびデフォルト値への復元
高度な機能ですので慎重に操作してください。使用する際は、現在の設定をバックアップしてから操作することをお勧めします!
共通キャリブレーションパネル
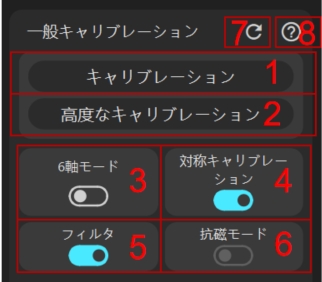
キャリブレーションボタン
共通キャリブレーションでは、A-Pose、S-Pose、T-Poseの3つの姿勢を取ってキャリブレーションを行います。動作の要領とキャリブレーションの詳細についてはこちらを参照してください
キャリブレーションが失敗する場合、以下の原因が考えられます:
- 装着が装着モードに合っていない、こちらを参照してください
- 誤って置き換えポイントを触った、こちらを参照してください
- USBドライバの問題が原因、こちらを参照してください
高度なキャリブレーションボタン
キャリブレーションボタンと比べて、ここではB-Poseが追加されており、主に頭部、胸部、腰部のノードの方位角キャリブレーションに使用されます。他は
キャリブレーション機能と同じです。6軸モードスイッチ
磁場環境が非常に悪い場合、6軸モードをオンにすることができます。6軸モードをオンにする前に、ジャイロスコープをキャリブレーションすることをお勧めします。6軸モードの意味は、磁力計センサーのデータを使用しないことです。したがって、磁場環境の影響を受けませんが、ジャイロスコープのドリフトという問題が発生します。具体的には、長時間使用すると方位角がずれることです。
方位角のずれ(方位角が傾いた)具体的な表れ
- 立っているときに傾く、例えば胸部が自転する
- 前傾するときに傾く表れは、正面に向かって前屈するつもりが、側前方に前屈してしまう
- 横になっているとき、例えば脚が体と一直線を保っているつもりが、傾いていると脚が体と水平な角度を持っている、例えば両脚が右に傾いている。
磁場環境の評価については、こちらを参照してください
抗磁モードスイッチ
- 磁場環境において特定のポイントが悪い場合、抗磁モードをオンにすることができます。
- センサーが体の小さな揺れに対してより速く追従することを望む場合、抗磁モードをオンにすることができます。
例えば、左右に揺れる場合、抗磁モードは非抗磁モードに比べてより速く追従します。非抗磁モードでは小さな揺れに対して追従が遅くなりますが、大きな揺れには影響がありません。
[info]抗磁モードをオフにするタイミング
- 大きな動きのダンスユーザーには、抗磁モードをオフにすることをお勧めします。また、6軸モードの使用もお勧めしません。ダンスユーザーは良好な磁場環境で行うことをお勧めします。
もちろん、将来的にはプロフェッショナル版のセンサーを提供する可能性があり、ジャイロスコープの性能が向上し、大きな動きのダンスモードを備える可能性があります。磁力計を使用しないことを期待しています。
- 磁場全体が非常に混乱している場合、例えば近くに変圧器がある、または部屋に大きなスピーカーがあり、磁場の放射範囲が広い、または鉄製のスプリングベッドで使用する場合、6軸モードをオンにすることをお勧めします。
抗磁スイッチはトラッカーに記憶されます。つまり、オンとオフを切り替えるたびに結果がトラッカーに保存され、ソフトウェア設定には保存されません。
フィルタースイッチ
動作の揺れを滑らかにするために使用され、通常はオンにすることをお勧めします。特定の部位の揺れがまだ大きい場合は、以下を確認してください:
- 着用が揺れを引き起こしていないか確認します。例えば、トラッカーが宙に浮いている場合
- 抗磁レベルを確認します。通常は12に設定することをお勧めします。揺れが発生した場合は、12に調整して再テストしてください。調整についてはこちらをご覧ください
対称キャリブレーションスイッチ
ここでのスイッチはキャリブレーション時にのみ有効で、主に磁場方位角測定誤差を排除するために使用されます(磁場方位角測定はキャリブレーション動作に基づいて測定され、キャリブレーション動作には誤差があり、磁場自体にも揺れがあるため、測定にも誤差が生じます)。一般的にはオンにすることをお勧めします【6軸モードでは自動的にオフになります】。具体的な効果は、キャリブレーション時に同じ水平位置で左右のトラッカーの方位角の平均を取ります。例えば、左上腿の現在の立ち方向の方位角が10度、右上腿の測定が20度の場合、15度の平均値を採用します。
左右の両脚が同じ水平高さにあり、磁場の方位差が大きい場合にのみ、オフにする必要があります。一般的に、同じ高さで磁場の差が大きい場合、磁場環境が悪いことを示しており、6軸の使用をお勧めします。
磁場環境の評価については、こちらをご覧ください
リセットボタン
現在のパネルのパラメータをデフォルトのパラメータにリセットします!後続のパネル機能は同じであり、繰り返し説明しません!
ヘルプドキュメントボタン
地面IK
両足の不均衡問題を調整するために使用されます。例えば、座った後、片足が地面にあり、もう片方の足が地面から2cmの高さにある場合、両足の切り替え中の上下の振動問題を緩和することができます。
足底を肩に置き換える
詳細設定,オンにすると、足底が自動的に肩に置き換えられます。左足は左肩に対応し、右足は右肩に対応します。オンにした後、
AI Engineを開く必要があります。どの6軸ポイントで6軸機能を有効にするかの設定
デフォルトの6軸モードでは、すべてのポイントで6軸機能が有効になっています。チェックを外すと、そのポイントは6軸モードを使用しません。
PC パネル
ここの設定は VR 利用ユーザーには影響しません。VR ユーザーはここをスキップできます。

フレームバッファ
デフォルトでは、PC では 2 フレームのバッファ(約 34 ms)が入り、これにより安定性が向上します。たとえばドリフトが小さくなる場合があります。上半身のみを使用するユーザーはオフにすると追従がよりリアルタイムになります。フレームバッファは
AI Engineをオンにした場合、デフォルトで有効になりません。ミラーリングモード
左右を反転します。配信者ユーザーが鏡のように左右反転表示したい場合に使用します。
AI エンジン
オンにすると、キャラクター全体の移動と足裏接地は従来のアルゴリズムやルールではなく
AIモデルによって判定されます。PC版の AI エンジンは 2 種類のモデルをサポートしています。両足にセンサーを装着するモデル(with foot) と、両足にセンサーを装着しなくてもよいモデル(no foot) です。
両足にセンサーを装着していない状態でwith footモデルを選択した場合、このモデルは両足のセンサーデータを必要とするため自動的にno footに切り替わります。ただしno footモードでも両足にセンサーを装着した状態をサポートできます。位置と向きおよび姿勢
- 慣性モーションキャプチャの原点はドリフトしやすいため、原点(初期位置)を直接リセットできます。リセット間隔を設定することもでき、デフォルトは 0 分で自動リセットしません。
n分に設定すると、n分ごとにキャラクターの位置をリセットします。 - また、キャラクターの水平面での移動と垂直面での移動をそれぞれロックすることもできます。これら 2 つの機能は主にライブ配信ユーザーに需要があります。
- キャラクターの基準位置および向きを手動で調整できます。デフォルトは原点です。アニメーションやライブ配信ユーザーが使用できます。たとえば配信者の部屋が小さく、画面に向かって
T-Poseを取れない場合、キャリブレーション後にキャラクターの向きを変更できます。 - 位置は
x y zの順で、右手座標系を使用します。グローバル移動を表し、xの正方向は画面右側、yの正方向は上方、zの正方向は画面の内側から外側を向きます。最大値は 99.9 m です。角度はキャラクターの向きを表します。 - 姿勢フリーズは配信者向けに開発された機能で、姿勢を固定して他の作業を行ったり、不要な姿勢をさらすのを防ぎます。スイッチをオンにするとその瞬間の姿勢で固定され、オフにするとリアルタイムのモーションキャプチャ状態に戻ります。
- 慣性モーションキャプチャの原点はドリフトしやすいため、原点(初期位置)を直接リセットできます。リセット間隔を設定することもでき、デフォルトは 0 分で自動リセットしません。
外部プロトコル出力
VMC 出力
VMC プロトコルを利用するユーザー向けです。サードパーティのソフトが VMC プロトコル経由で接続している場合、VMC 出力をオンにする必要があります。
- オフにした後でポート番号を変更し、その後再度オンにできます。
- VMC スケールは主にキャラクターのボーンに合わせるためのもので、rebocap で駆動しているキャラクターボーンとターゲットボーンが一致しない場合、スリップしたり足が床から浮いたり、床下にめり込むなどの現象が起こることがあります。ここを調整することで軽減できます。ただし VRM モデルを使用している場合は VRM モデルをアップロードし、ここは 1.0 に設定することを強く推奨します。その他のモデルでより良い表現を望む場合もボーンをアップロードすることをお勧めします。ボーンは Blender プラグインでエクスポートできます。具体的なエクスポート方法は Blender插件使用 を参照してください。
VR 出力(上級機能)
オンにすると、SteamVR に接続されている場合は仮想トラッカーが自動的に SteamVR へ出力されます。トラッカー出力ノードを変更する必要がある場合は、一時的に
VRパネルに切り替えて VR 出力設定を変更し、その後ここへ戻ってください。ここで出力されるのは現在の仮想ボーン上のトラッキングポイントの位置で、ヘッドセットの影響は受けません。
以下はコミュニティが提供するヘッドセット無しで SteamVR を使用する手順です。公式は一切の結果に責任を負いません。参考情報としてご利用ください。中国語のみで提供されています。他言語版はブラウザの翻訳機能をご利用ください: https://forum.rebocap.site/t/vmt-rebocap/240録画とオフラインロード機能
録画機能
基本的な手順は「録画開始 → 録画終了 → モーション書き出し」です。ここでは fbx、bvh、dae の 3 種類の形式で書き出せます。将来的には
MMDアニメーションのサポートを検討しています。
なお、fbx6 は従来の fbx フォーマットであり、最新のソフトウェアでは従来フォーマットをサポートしていない場合があります。
書き出した FBX のボーンはMixamoと互換性があり、Blenderやその他の 3D ソフトに直接インポートできます。ルートアニメーションとT-Poseを追加するかはオプションです。デフォルトではモーキャプで移動するのはヒップノードですが、ルートアニメーションではルートノードが移動します。また、アニメーション開始時をT-Poseのデフォルト姿勢にしたい場合はこのオプションをオンにしてください。
FBX でアニメーションを制作する場合は、エクスポートされた FBX のボーンの絶対方向ではなく、必ず回転情報を使用してください。後日、コミュニティメンバーに依頼してモーキャプデータでアニメーションを作成する動画を公開する予定です。オフラインロード
用途: オフラインでの読み込みおよび再生。書き出した
.rebo_animの生データを読み込みます。
使い方: 「オフラインロード」をクリックし、元の記録データファイルを選択すると、アニメーションが自動再生されます。オンラインと同じように、ロード前にユーザーボーンを変更したり、IKを使用するか、AI Engineを使用するかを選択したりでき、モーションキャプチャのパラメータ変更はリアルタイムで反映されます。
再生速度を調整できますが、SDK の出力フレームレートも変化します。現在はサンプリングや補間のアルゴリズムはありません。再生の一時停止、再開、ループ再生などが可能です。再生が終了した後は再生状態のボタンのテキストは変化しません。再度再生するには再生ボタンを 2 回クリックしてください。
録画したアニメーションは 60fps です。そのため、長さから目的のフレーム数を計算できます。例えば 10.5 秒にジャンプしたい場合は 630 フレームへジャンプします。フレーム番号を変更すると即座にジャンプします。[info]公式デフォルトデータの使用について
ユーザーが自身のソフトウェアでサポートできるか、または効果を確認したい場合は、オフラインデータを利用できます。現段階のオフラインデータは 1 本のダンス動画です。あらかじめスケルトンをアップロードし、AI Engineに変更し、with footモードを使用し、Ground IKを有効にすることを推奨します。
データ収録時にモーキャップ担当者はセンサーを胯部ではなく腹部に装着していたため、モーキャップ設定およびIKパラメータで腰部の柔軟性を 1.3、IK ウェイトを 1.4、脚の曲げを 3.5 付近に調整することを推奨します。ダブルタップ校正-胸部
有効化すると、センサーをダブルタップすることで機能をトリガーできます。胸部のダブルタップは原点リセットに使用します。
注意:ここでのダブルタップとはセンサーを軽く叩くことであり、センサーのボタンをダブルクリックすることではありません!ボタンを誤って押さないでください!叩く間隔は最長 0.45 秒、最短 0.2 秒で、ある程度の力を加える必要があります。
ダブルタップ校正-腰部
有効化すると、センサーをダブルタップすることで機能をトリガーできます。胸部のダブルタップは原点リセット、腰部のダブルタップは動作校正のトリガーに使用します。
VR パネル
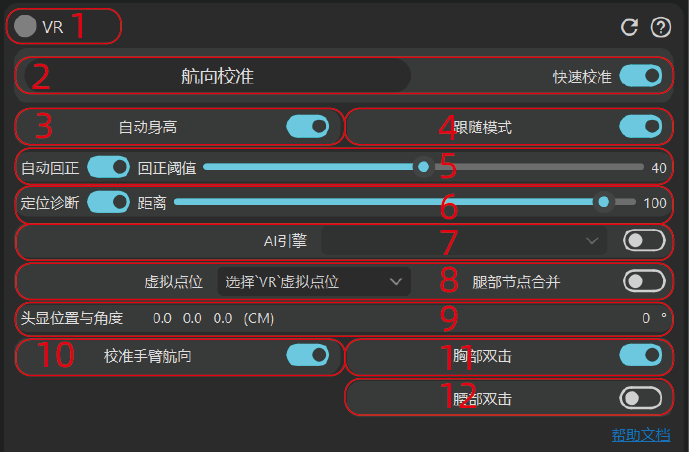
SteamVR 接続状態インジケーター
接続に成功している場合は緑色で表示されます。接続できない場合は無色です。接続できない場合はこちらを参照
ヨー軸リセット
ヨー軸をリセットする際、全身は側面方向に角度が付かないようにし、人体の側面軸を中心に回転させてください。たとえば立位では A ポーズを保ち、座る場合は膝を正面に向け、寝る場合は体を一直線に保ちます。現在、このヨー軸校正は腕部には適用されません。今後、腕部にも対応予定です。
この機能はヨー軸が傾いた場合の校正に使用します。傾きの例はこちらを参照してください。校正後も傾きが残る場合は、以下の 3 点を確認してください:
- ストラップ自体が傾いている
- セーフティエリアがオフになっていない — スタンドアロン HMD のセーフティエリアをオフにしてください
- vrc toolkit などでヨー角を変更している場合は 0 にリセット
「クイックスキップ」スイッチはヨー軸校正時間を短縮するためのもので、オフの場合はインターバルが表示されます。オンにするとインターバルは表示されません。
ヘッドセット位置情報
ここにはヘッドセットの位置が CM 単位で表示されます。2 番目の値は高さ、最右端はヘッドセット自体のピッチ角です。
足滑り防止
足滑り防止をオフにすると、全身の駆動は完全にヘッドセット位置に従い、足裏は固定されません。そのためデフォルトモードでは足滑りが発生します。身体の骨格と現実の姿勢を一致させることで緩和できます。
なお、キャラクターの足裏の高さが約 20 cm 以上になると、内部計算は自動的にデフォルトモードに切り替わります。足滑り防止をオンにすると、足裏が強制的に床に貼り付き、激しい動きでなければより自然に表現されます。一般的に激しくないダンスでの使用を推奨します。
地面衝突 IK
座った際に片足が地面に接し、もう片足が 2 cm 浮くなどの不均衡を調整します。また、両足の切り替え時に上下に揺れる問題を緩和します。
自動リセット機能
自動リセットは、ユーザーが全身を約 1 秒間静止させるとトリガーされます。リセット閾値は現在の姿勢とフォローモード(ヘッドセット位置のみに従う)時の姿勢との差、すなわち仮想トラッカーの距離を指します。この距離が閾値を超えるとリセットが発動します。閾値が低すぎると頻繁にリセットが発生し、トラッカーが小刻みに瞬間移動するように見えます。
リセット後、トラッカーは直ちにフォローモード下の位置に戻ります。リセット結果に違和感がある場合は、フォローモードに切り替えて確認してください。ヨー角がズレている、またはストラップ自体が傾いている可能性があります。
胸|腰 ヘッドセット追従
デフォルトでは「足滑り防止」スイッチがオンになっている場合、すべてのノード位置はヘッドセットと足裏の位置を組み合わせて決定されます。このスイッチをオンにすると、胸部と腰部のノード位置はヘッドセットの位置のみによって決定されます。
仮想トラッカーポイント
表示する仮想トラッカーをここで設定できます。たとえばデフォルトでは腕がオンになっていますが、ここをクリックして腕のポイントをオフにできます。VRC モードをオンにすると、上腿と下腿のセンサーを統合し、膝位置に配置します。プレイヤーは状況に応じてオン/オフを選択できます。VRC モードをオンにしたからといって、必ずしも VRC 内での挙動が良くなるわけではありません。ここでのオプションは、単に仮想トラッカーを VRC IK の計算により適した場所へ移動するだけであり、効果は VRC IK の他の要因(仮想骨格が実際の骨格と一致しているか等)にも左右されます。
電源オフ時の自動非表示
使用していないセンサーを自動的に非表示にします。ただし、脚部ノード統合機能を使用している場合、足裏センサーは非表示対象から除外されます。
脚部ノード統合
上腿と下腿の仮想センサーを膝関節に統合します。これは VRC で推奨されるセンサー配置でもありますが、VRC 内で必ずしもより良い効果を得られるわけではありません。
位置診断
トラッカーの位置精度を確認するための補助機能です。有効化すると、自分の正面に新しい仮想トラッカーを複製表示します。距離の単位は cm で、スライダーで調整可能です。仮想トラッカーを確認したい場合は、SteamVR のデフォルトシーンに切り替えて確認することを推奨します。Reborn や VRC などのサードパーティソフトでは、特別なモードでない限り仮想トラッカーは表示されません。
バーチャル地面の高さ
主に、高さが地面より高い段差(例:上に乗る場合)や地面より低い段差に降りる場合に、バーチャル地面が元の地面として計算されることで生じる不自然さを解消するために使用します。その他の状況でも、実際の使用に合わせて設定可能です。例えば一部のプレイヤーは、バーチャル地面の高さを実際の地面より3〜5cmほど高く設定し、IK演算空間に余裕を持たせて全体的な挙動を改善しています。
AIエンジン
AIエンジンをオンにすると、5点モーキャプをサポートします。着用位置は足首に2点(足首から約5cm上を推奨)、大腿に2点、腰に1点が最低限必要なポイントです。その他のポイントは実際の状況に応じて装着してください。装着しない場合は、AIモデルが足底と胸部ノードの向きを予測します。
「その場歩行 & コントローラ置き換え」機能スイッチ
この 2 つの機能は、rebocap プラグインが SteamVR 内部のハンドコントローラ入力をフックすることで実現しています。公式ストリーミングツール(
steam link、pico connectなど)には影響しませんが、VD ストリーミング(VirtualDesktop)ではハンドコントローラ状態からハンドトラッキング状態に切り替えられなくなります。本機能をオン/オフした場合は SteamVR を再起動する必要があります。この機能をオフにすると、その場歩行およびコントローラ位置の置き換え機能を使用できません。
その場歩行機能編集エリア
本機能を利用するには、上記の「その場歩行 & コントローラ置き換え」機能スイッチをオンにしておく必要があります。動作としては、その場で足踏みしている間、指定したコントローラのスティック入力(左または右)をハイジャックし、足踏み動作からスティック入力を疑似生成してゲーム内キャラクターを移動させます。これにより、スティック操作で移動した際の酔いを軽減できます(一定の大脳皮質欺瞞効果)。足踏み中はデフォルトで前方へ進みますが、スティックで方向転換(後退など)が可能です。足踏み速度は「歩行倍率」で調整でき、また自身の足踏み角速度も前進速度に直接影響します。
デフォルトでは、足踏み機能がオンの間は対応するコントローラのスティックが無効になります。ただし、足踏みが検出されていない時にスティック機能を復活させるスイッチを用意していますが、酔いやすくなる可能性があります。
腕のヨー角キャリブレーション
オンにすると、腕ノードを有効にした状態でヨーキャリブレーションを実行すると同時に腕のヨー角も補正されます。キャリブレーション中は腕を左右対称にし、腋に自然に沿わせる(胸から約 10〜25 度)ように配置してください。補正結果を確認しながら腕の位置を調整してください。
コントローラ位置の置き換え
本機能を利用するには、上記の「その場歩行 & コントローラ置き換え」機能スイッチをオンにしておく必要があります。オンにして両手の出力ノードを同時に有効にすると、rebocap トラッカーのポイントがコントローラ出力ポイントを上書きします。この際、ハンドコントローラは接続されたままである必要があります。本機能の主目的は、HMD の視界死角に入ったときのコントローラ位置ロストを解消することです。
注意:一部のコントローラではレイの角度とコントローラの向きが一致しません。その場合は
data/replace_controller_angle.txtを編集して補正角度を設定してください。たとえばpicoのコントローラは 25 と設定する必要があります(前方へ 25 度回転させる補正)。T ポーズ時のコントローラの向きを参考に調整し、編集後に本機能のスイッチをいったんオフ/オンすると反映されます。胸部ダブルタップ(上級機能)
オンにすると、胸部センサーをダブルタップしてヨーキャリブレーションをトリガーできます。
注意:ここで言うダブルタップとはセンサーを叩くことであり、センサーのボタンを 2 回押すことではありません!ボタンを誤って押さないようにしてください!叩く間隔は最大 0.45 秒、最小 0.2 秒で、ある程度の強さが必要です。また、就寝中などに誤動作する可能性があるため、オフにすることを推奨します。
腰部ダブルタップ(上級機能)
使い方は胸部ダブルタップと同じで、ダブルタップするとポーズキャリブレーションをトリガーします。
VR 自動身長
すでにスケルトン部に移行されており、デフォルトでオンになっています。ここでいう自動身長はヘッドセットの高さから個人の身長を推定する機能です。ただし、ヘッドセットの高さ測定は環境に大きく左右され、測定精度にも依存します。現在の身長計算方式は:height = headset * 1.05。
つまり、キャリブレーション時に頭を下げたり上げたりすると身長測定に影響します。通常、測定誤差は ±3cm 以内に抑えるのが望ましく、誤差が大きい場合はヘッドセットと床の距離をキャリブレーションしてください。
[danger]測定誤差について
高さ測定の誤差が大きい場合でも、rebocap デバイスや rebocap ソフトウェア自体には一切関係ありません。rebocap はヘッドセットの高さを読み取り、1.05 の係数を掛けて身長を推定しているだけです。誤差が大きい場合、ほとんどはスタンドアロン機の高さ測定誤差が原因です!!!
スタンドアロン機の測定誤差は床高さをキャリブレーションすることで概ね解決できます。それでも大きな誤差がある場合は周囲環境の影響が考えられます(スタンドアロン機は主にカメラが捉えた環境を基に測定を行います)。部屋の中で比較的開けた場所を探すことで改善される場合があります。